


















APPENDIX
App. - 10
App. 5.2 Position resolution and electronic gear setting
Position resolution (travel distance per pulse ∆l) is determined by travel distance per servo motor revolution
∆S and the number of encoder feedback pulses P
f
, and is represented by Equation 5.1. As the number of
feedback pulses depends on the servo motor series, refer to standard specifications in the chapter of servo
motor series.
∆l =
P
f
··························································································································· (5.1)
∆l: Travel distance per pulse [mm/pulse]
∆S: Travel distance per servo motor revolution [mm/rev]
P
f
: Number of feedback pulses [pulse/rev]
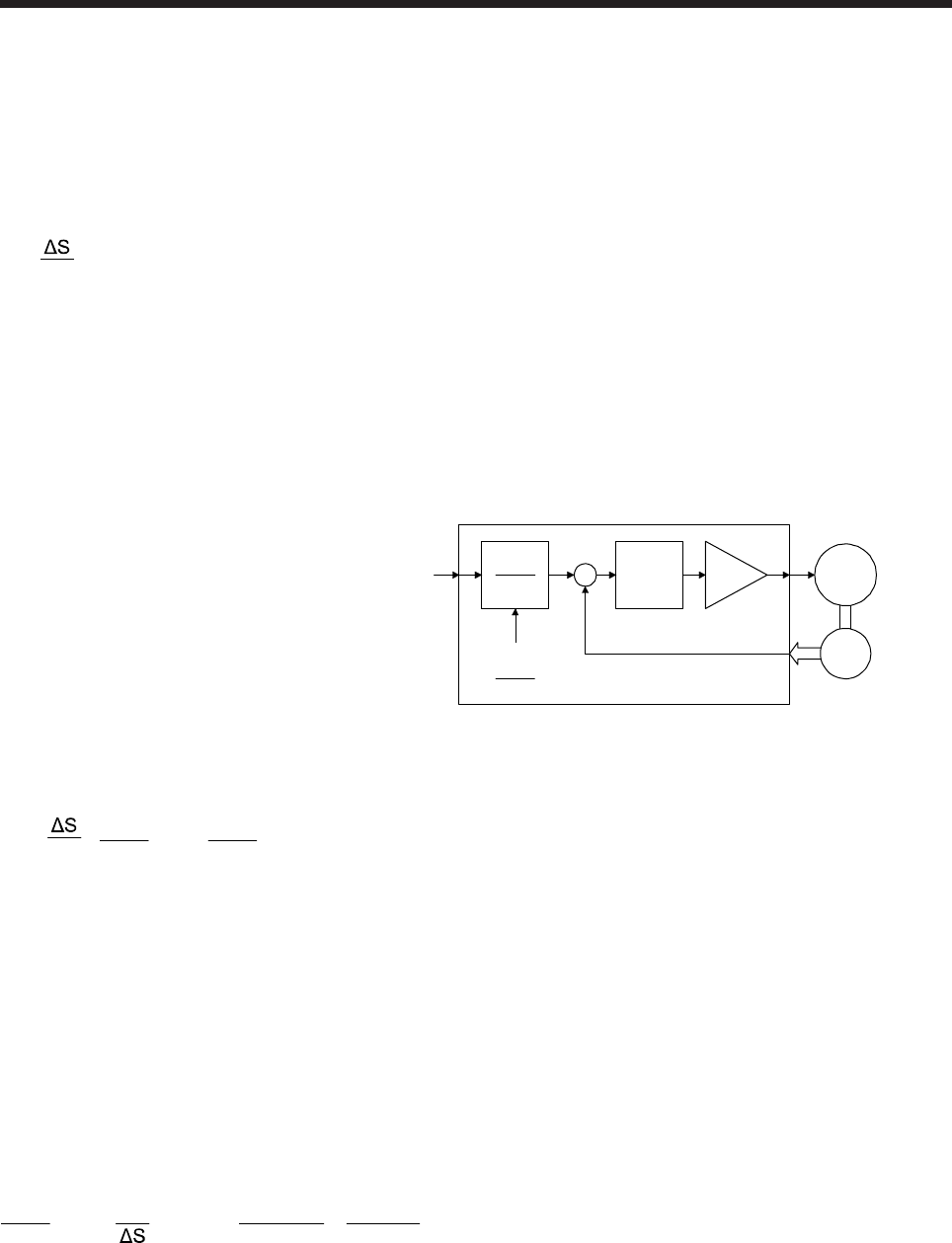
Since ∆l has the relation represented by equation 5.1, its value is fixed in the control system after the drive
system and encoder have been determined. However, travel distance per command pulse can be set as
desired using the parameters.
Command pulse
frequency f
0
+
-
Electronic gear
CMX
CDV
CMX
CDV
Deviation
counter
Encoder
M
P
f
= 4194304 pulses/rev
Servo moto
r
As shown above, command pulses are multiplied by CMX/CDV set in the parameters to be position control
pulses. Travel distance per command pulse ∆l
0
is expressed by Equation 5.2.
∆l
0
=
P
f
•
CDV
CMX
= ∆l •
CDV
CMX
······························································································· (5.2)
CMX : Electronic gear (command pulse multiplication numerator)
CDV : Electronic gear (command pulse multiplication denominator)
Using the above relation, travel distance per command pulse can be set to a value without fraction.
[Setting example]
Find a parameter value for ∆l
0
= 0.001 mm/pulse in a drive system where ball screw lead P
B
= 10 mm and
reduction ratio 1/n = 1.
The encoder feedback pulses P
f
of the HG-KR = 4194304 pulses/rev.
Since ∆S = 10 mm/rev, the following is obtained according to equation 5.2.
CDV
CMX
= ∆l
0
•
P
f
= 0.001 •
10
4194304
=
625
262144