



















APPENDIX
App. - 11
Relation between position resolution ∆l and overall accuracy
Positioning accuracy of machine is the sum of electrical errors and mechanical errors. Normally, provisions
should be made so that positioning accuracy are not affected by electrical system errors. As a guideline,
Equation 5.3 should be satisfied.
∆l <
5
1
10
1
• ∆ε ············································································································· (5.3)
∆l: Travel distance per feedback pulse [mm/pulse]
∆ε: Positioning accuracy [mm]
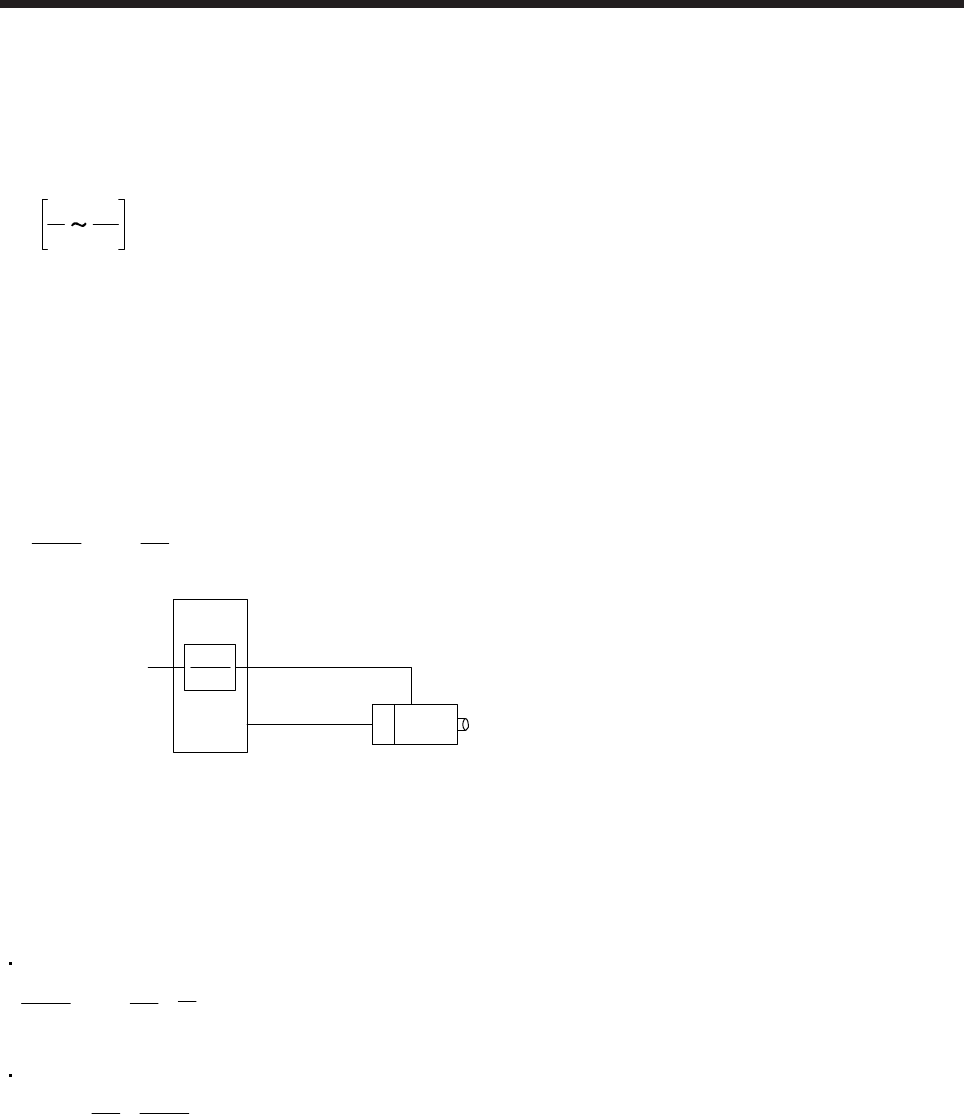
App. 5.3 Speed and command pulse frequency
The servo motor is run at a speed where the command pulses and feedback pulses are equivalent.
Therefore, the command pulse frequency and feedback pulse frequency are equivalent. The following shows
the relation including the parameter settings (CMX and CDV). (Refer to the following diagram.)
f
0
•
CDV
CMX
= P
f
•
60
N
0
············································································································ (5.4)
Feedback pulse
frequency
f
0
Electronic
gear
Servo motor
CMX
CDV
f
0
: Command pulse frequency [pulse/s]
(differential line driver)
CMX: Electronic gear
(command pulse multiplication numerator)
CDV: Electronic gear
(command pulse multiplication denominator)
N
0
: Servo motor speed [r/min]
P
f
: Number of feedback pulses [pulse/rev]
(P
f
= 4194304 for HG-KR)
According to equation 5.4, the following equations may be used to obtain the electronic gear and command
pulse frequency to rotate the servo motor at N
0
.
Electronic gear
CDV
CMX
= P
f
•
60
N
0
•
f
0
1
········································································································ (5.5)
Command pulse frequency
f
0
= P
f
•
60
N
0
•
CMX
CDV
········································································································· (5.6)