


















APPENDIX
App. - 13
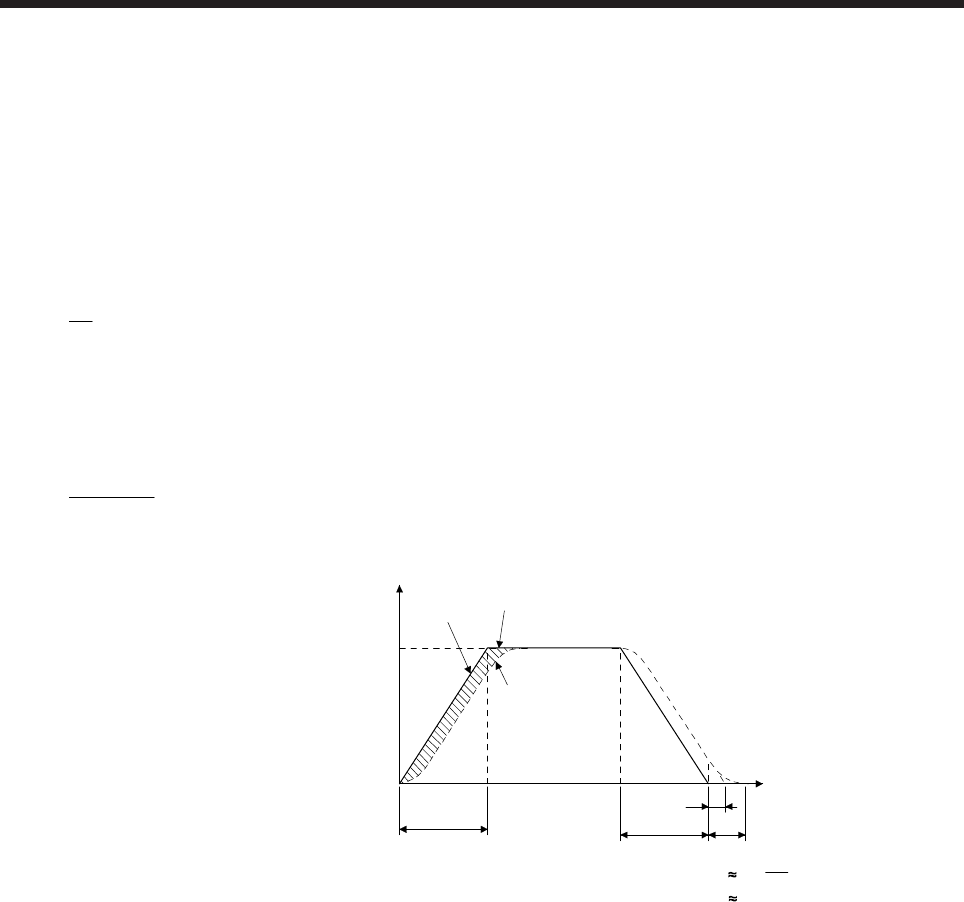
5.4 Stopping characteristics
(1) Droop pulses (ε)
When you use a pulse train command to run the servo motor, the relation between the command pulse
frequency and servo motor speed will be as follows. The difference between the command pulses and
feedback pulses during acceleration are called droop pulses, which are accumulated in the servo
amplifier deviation counter. Equation 5.7 defines a relation between the command pulse frequency (f)
and position control gain 1 (Kp).
ε ≈
K
p
f
0
[pulse] ·············································································································· (5.7)
Supposing that the value of position control gain 1 is 70 rad/s, the droop pulses during operation will be
as follows at the command pulse frequency of 200 kpulses/s according to equation 5.7.
ε ≈
70
200 • 10
3
≈ 2858 [pulses]
t
s
0.04
T
p
t
s
t
psd
t
psa
0
Servo motor
speed
Droop pulses
Command
Time
1
70
Command pulse frequency f [pulse/s]
Servo motor speed [r/min]
3 •