


















APPENDIX
App. - 22
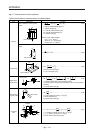
App. 5.9 Selection example
Servo motor
Machine
specification
Gear ratio 5: 8
Servo amplifier
Feed speed of moving part
Travel distance per command pulse
Feed per cycle
Positioning time
Number of feeds
Operation cycle
Reduction ratio
Moving part mass
Drive system efficiency
Friction coefficient
Ball screw lead
Ball screw diameter
Ball screw length
Gear diameter (servo motor shaft)
Gear diameter (load shaft)
Gear face width
Number of feedback pulses
V
0
= 30000 [mm/min]
∆l
0
= 0.001 [mm/pulse]
l = 400 [mm]
t
0
= within 1 [s]
40 [times/min]
t
f
= 1.5 [s]
1/n = 5/8
W = 60 [kg]
η = 0.8
µ = 0.2
P
B
= 16 [mm]
D
B
= 20 [mm]
L
B
= 500 [mm]
D
G1
= 25 [mm]
D
G2
= 40 [mm]
L
G
= 10 [mm]
P
f
= 4194304 [pulses/rev]
(1) Selection of control parameters
Setting of electronic gear (command pulse multiplication numerator/denominator)
There is the following relation between the electronic gear and command resolution ∆l
0
.
∆l
0
=
P
B
P
f
• n
•
CDV
CMX
When the above machining specifications are substituted in the above equation
0.001 =
4194304 • 8/5
16
•
CDV
CMX
CDV
CMX
=
1
1000
•
4194304 • 8/5
16
=
262144
625
CDV
CMX
Acceptable as CMX/CDV is within 1/10 to 4000
(2) Servo motor speed
N
0
=
P
B
V
0
•
1/n
1
=
30000
16
•
5
8
= 3000 [r/min]