
















The equation assumes that both the microphone and the speaker are mounted on the same wall (which is
the worst case in terms of the number of reflections that will be cancelled). In that case, N must be an odd
integer because the even reflections travel away from the microphone.
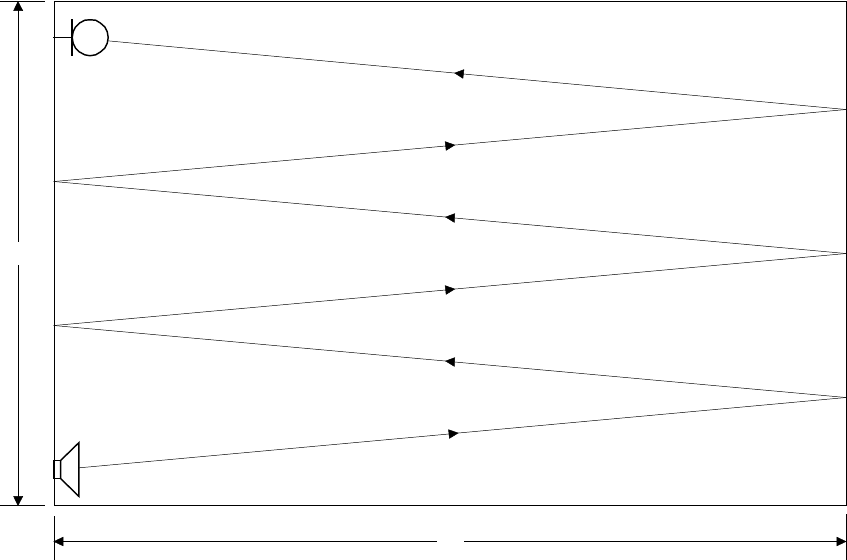
For example, consider a 10x20x30 foot conference room with very reflective surfaces that requires 5 echoes
to be cancelled. In such a room, a tail length of 6 * 30 / 1125 = 160 ms would be needed. Figure 2 shows
how these reflections would travel back and forth across the room.
D
i
r
e
c
t
1
s
t
R
e
f
l
e
c
t
i
o
n
2
n
d
R
e
f
l
e
c
t
i
o
n
3
r
d
R
e
f
l
e
c
t
i
o
n
4
t
h
R
e
f
l
e
c
t
i
o
n
5
t
h
r
e
f
l
e
c
t
i
o
n
Mic
Speaker
30 '
20'
Figure 2: Longest Reflection Path from Speaker to Microphone for 5 Reflections
Howling Rejection
Howling rejection is important in cases where both parties are using hands-free communications systems.
In these types of systems, it is very easy for the open microphones and loudspeakers to produce acoustic
feedback, resulting in squealing tones (much like the feedback from a microphone in an auditorium). This
obviously prevents any useful conversation from taking place. The most common way to avoid this problem
is to implement howling rejection, typically done by shifting the frequency of the signal as it goes through
the canceller. G.167 specifies a maximum frequency shift for howling rejection, but does not actually
require that howling rejection be a part of an echo canceller. Generally, any AEC solution that does not
have howling rejection should be avoided.
8