



















6. HG-MR SERIES/HG-KR SERIES
6 - 16
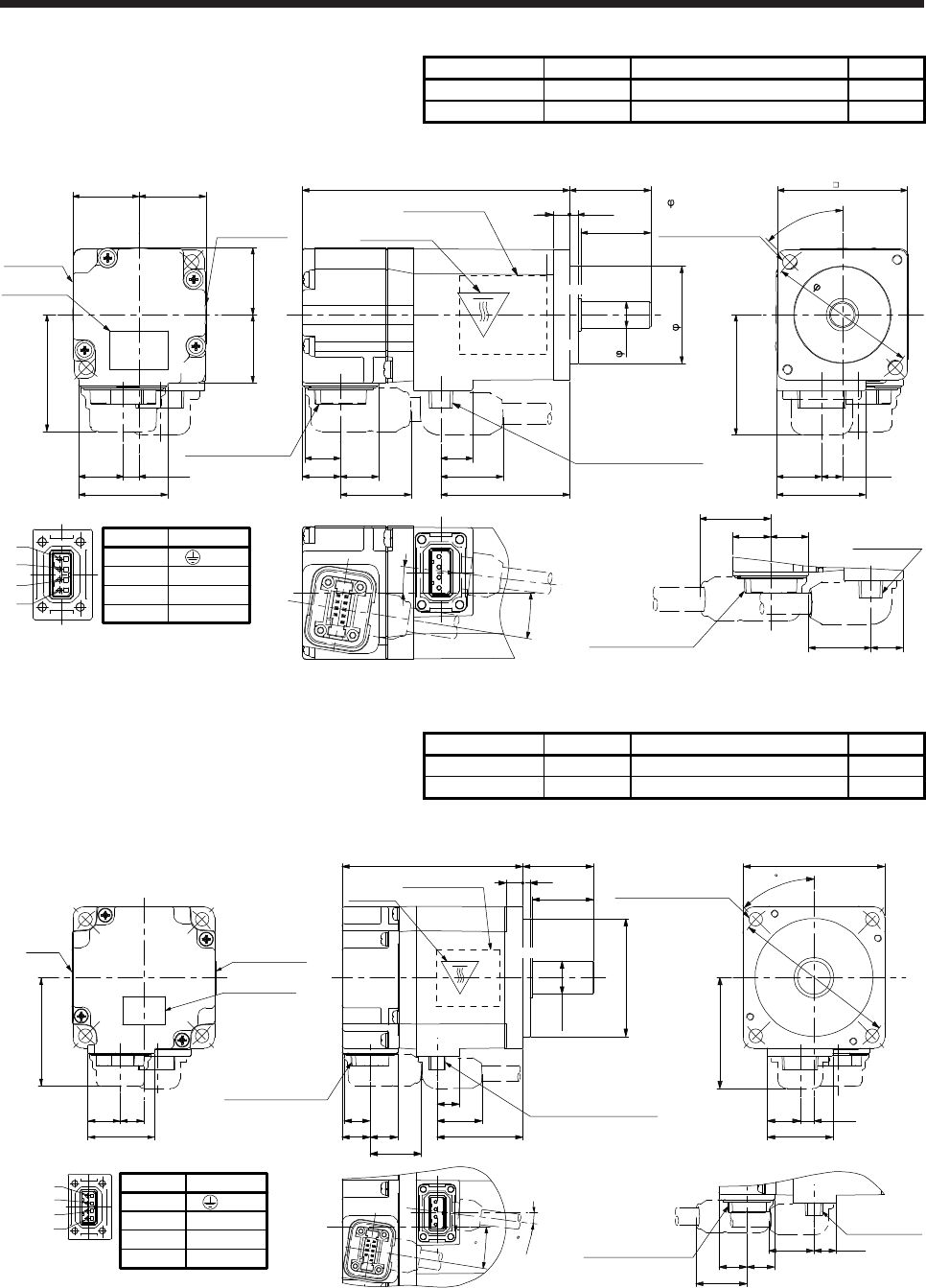
Model Output [W] Moment of inertia J [× 10
-4
kg•m
2
] Mass [kg]
HG-MR13 100 0.0300 0.54
HG-KR13 100 0.0777 0.54
[Unit: mm]
Power supply connector
Pin No.
4
3
1
2
Application
W
V
U
(PE)
40
4
5
°
37.1
6.4
27.527.4
4.9
Bottom
Top
13.9
20.720.5
Caution plate
21
13.7
20.7
36
Encoder connector
Power supply
connector
19.2
11.711.7
9.9
21.7
Opposite-load side
Motor plate
Caution plate
1
2
3
4
25
2.5
9.9
11.7
11.7
21.5
19.2
10.9
21.7 39.8
82.4
5
Encoder connector
Power supply connector
Caution plate
Motor plate
(Opposite side)
Bottom
Top
Top
Bottom
BC38022C BC38017C
8
h
6
30h7
9
°
7
°
1234
2- 4.5 mounting hole
Use hexagon socket
head cap screw.
4
6
Model Output [W] Moment of inertia J [× 10
-4
kg•m
2
] Mass [kg]
HG-MR23 200 0.0865 0.91
HG-KR23 200 0.221 0.91
[Unit: mm]
Caution plate
Encoder connector
46
28.4
13.7 10
Caution plate
Motor
plate
Caution
plate
76.6 30
73
26
φ50h7
φ14h6
36.4
19.2
9.5
Power supply connector
21.7
11.7
11.8
10.9
□60
47.1
4-φ5.8
mounting hole
Use hexagon socket
head cap screw.
4
5
φ
7
0
27.8
13.9 5.9
Opposite-load side
9.5
11.8
11.7
19.2
21.7
Power supply
connector
Encoder connector
BC38023B BC38018B
9
7
Power supply connector
Pin No.
4
3
1
2
Application
W
V
U
(PE)
1
2
3
4
1234
Bottom
Top
Motor plate
(Opposite side)
Bottom
Top
Bottom
Top