



















16. NAVIGATION SENSORS
16-8
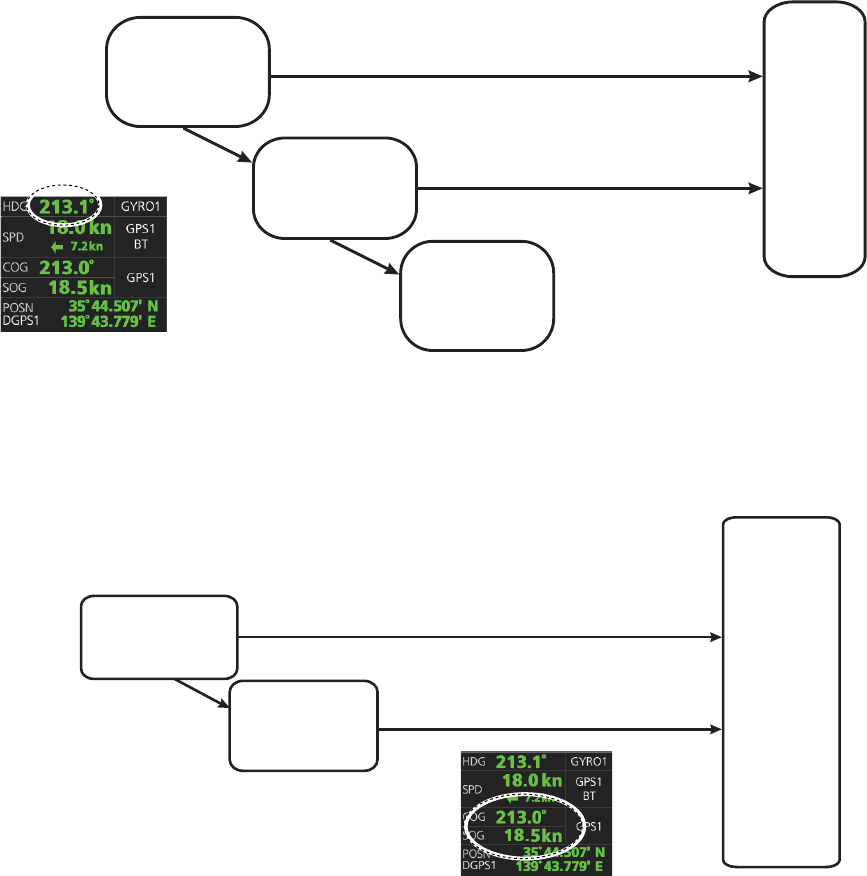
16.5 Source of Navigation Data
The figure below shows how various sources of navigation data are chosen. "SOG,
COG" is speed over the ground and course over the ground, respectively. "SPD" is
speed through the water.”Drift” is the difference between speed through the water and
speed over ground.
Heading used by the system is shown at the top-right position on the chart radar dis-
play. In the example shown below, heading is received from a gyrocompass and it is
shown without additional text, meaning the value is referenced to true North.
SOG/COG used by the system is shown at the top-right position on the chart radar
display. In the example below, COG and SOG are from chosen position sensors and
this is indicated with the text "GPS*" or "LOG*" (* is the number of sensors).
Heading sensor
selected as
high priority
Alert 450
“Heading
Sensor Not
Available”
Heading
used by
this
system
Selected
Valid data exists
No valid
data exists
GPS1
No valid
data exists
Heading sensor
selected as low
priority
Valid data exists
Valid data exists
No valid
data exists
COG/SOG
calculated from
speed log
COG/SOG from
position sensor
SOG/COG
used by
this system