



















9
User Manual
1. Overview
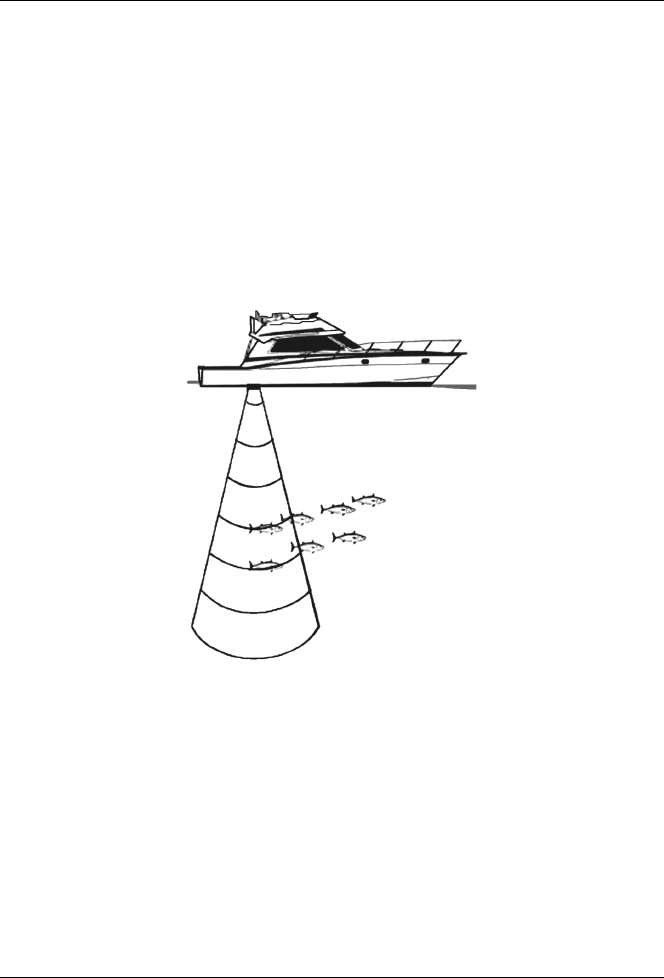
The Fish Finder consists of a high power transmitter, sensitive receiver and a
transducer. The Fish Finder sends an electrical pulse to the transducer which
contains an element that converts the pulse into acoustic (sound) wave which is
sent through the water. As this wave travels from the transducer to the bottom, it
may strike fish, structures, thermal clines (temperature changes in the water).
When the wave strikes an object(s) a certain amount of the wave is reflected back
to the transducer depending on the composition and shape of the object. When
the reflected wave is returned to the transducer it is converted into an voltage
and is amplified by the receiver, processed and sent to the display. The speed of
sound in water is roughly 4800 ft./sec, so the time lapse between the transmitted
signal and the received echo can be measured and the distance to the object
determined.
Fig. 1 - Fish Finder working principle
1.1 FISH FINDER
Features & Functions
♦ A-Scope (displays Sonar Echo in real time)
♦ 2X and 4X Zoom (capability to magnify any part of the Fish Finder
display of a fixed rate)
♦ Full auto to manual, working preset modes (Fish, Cruise)
♦ Bottom Lock (capability to magnify a user defined range around the
bottom)
♦ White Line (help distinguish between fish and bottom, when fish are
swimming close to the bottom)