



















88
Operation selection functions 1 (Pr. 17 to Pr. 37)
<Setting>
3.5.3 RH, RM, RL signal input compensation (Pr. 28 )
Pr. 810 Setting Torque Limit Input Method Operation
0 Internal torque limit
Parameter-set torque limit operation is performed.
Changing the torque limit parameter value by communication
enables torque limit to be adjusted by communication.
1 External torque limit Torque limit using the analog voltage from terminal 3 is made valid.
REMARKS
Refer to the Instruction Manual (basic) for details of the other parameters.
CAUTION
Whether the torque limit in the constant power range is set to constant torque limit or constant power
limit in the torque limit setting depends on the setting of Pr. 803 "constant power range torque
characteristic selection".
Related parameters
• Torque command bias adjustment ⇒ Pr. 904 "torque command terminal 3 bias" (Refer to page 190.)
• Torque command gain adjustment
⇒ Pr. 905 "torque command terminal 3 gain" (Refer to page 190.)
Pr. 24 to Pr. 27 Refer to Pr. 4 to Pr. 6 (page 77)
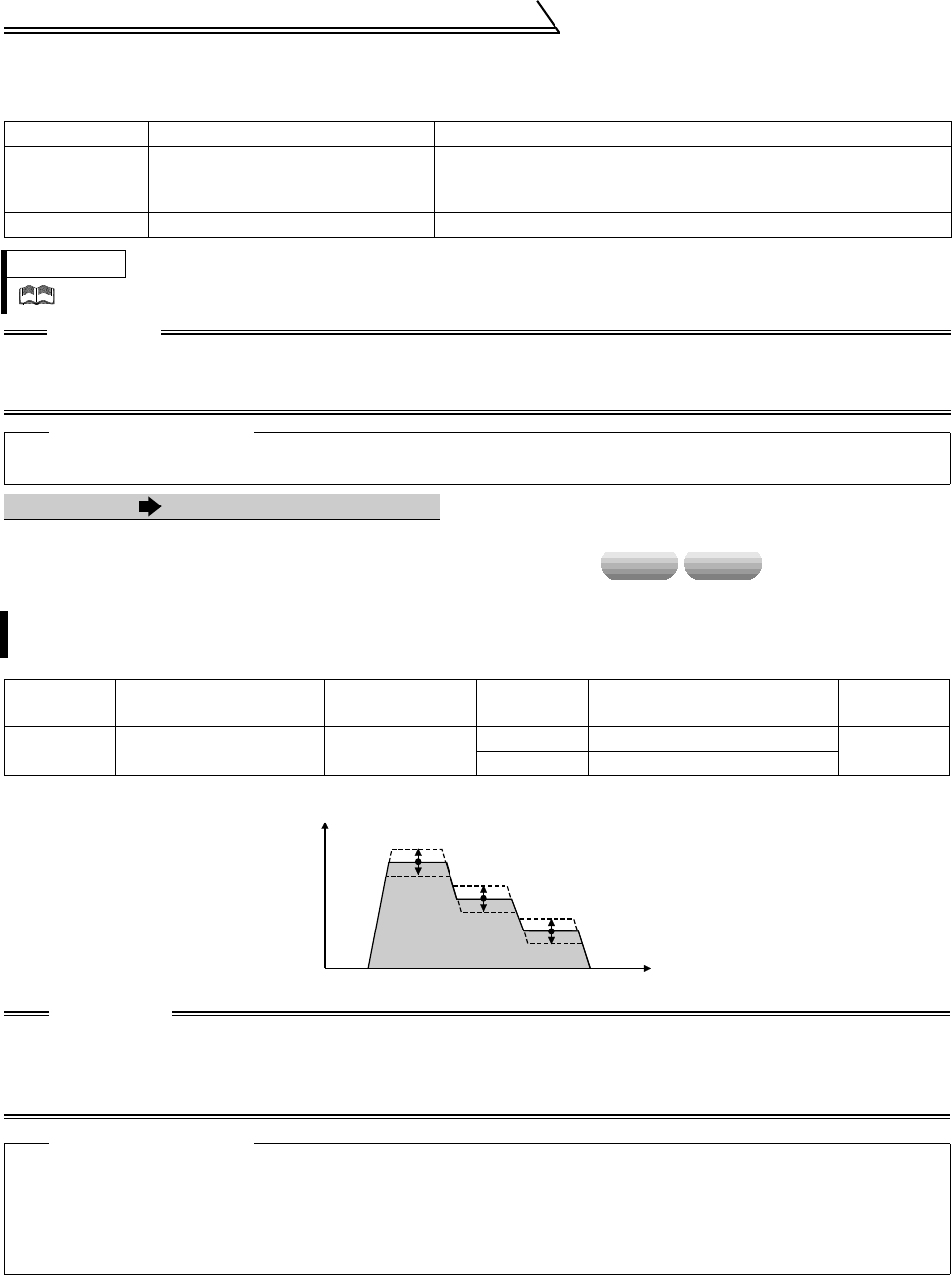
By entering 0 to ±10V into terminal 1 (speed setting auxiliary terminal), the speeds of the RH, RM and RL
signals (command speeds for multi-speed operation) can be compensated for.
Parameter Name Factory Setting
Setting
Range
Description Remarks
28
Multi-speed input
compensation
0
0 Without compensation
Extended
mode
1 With compensation
CAUTION
• When "4 or 14" is set in Pr. 73, the compensation signal is input from terminal 2, not from terminal 1.
(Override function)
• Since terminal 1 is a multi-function selection terminal, its function varies with the Pr. 868 setting. Set
"0" in Pr. 868. Refer to Pr. 902 and Pr. 903 for calibration of the terminal 1.
Related parameters
• Multi-speed setting ⇒ Pr. 4 to Pr. 6, Pr. 24 to Pr. 27, Pr. 232 to Pr. 239 (multi-speed setting) (Refer to page 77.)
• RH, RM, RL signals
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
• Speed compensation using terminal 2
⇒ Pr. 73 "speed setting signal" (Refer to page 113.)
• Function assignment to terminal 1
⇒ Set "0" in Pr. 868 "terminal 1 function assignment" (Refer to page 183.)
• Pr. 59 "remote setting function selection"
⇒ Refer to page 103.
• Calibration of terminal 1
⇒ Pr. 902 "speed setting terminal 2 bias", Pr. 903 "speed setting terminal 2 gain" (Refer to page 190)
speed torque
High
speed
Middle
speed
Low
speed
Time
Output
speed
(r/min)
t