



















Maintenance
20221586B 101
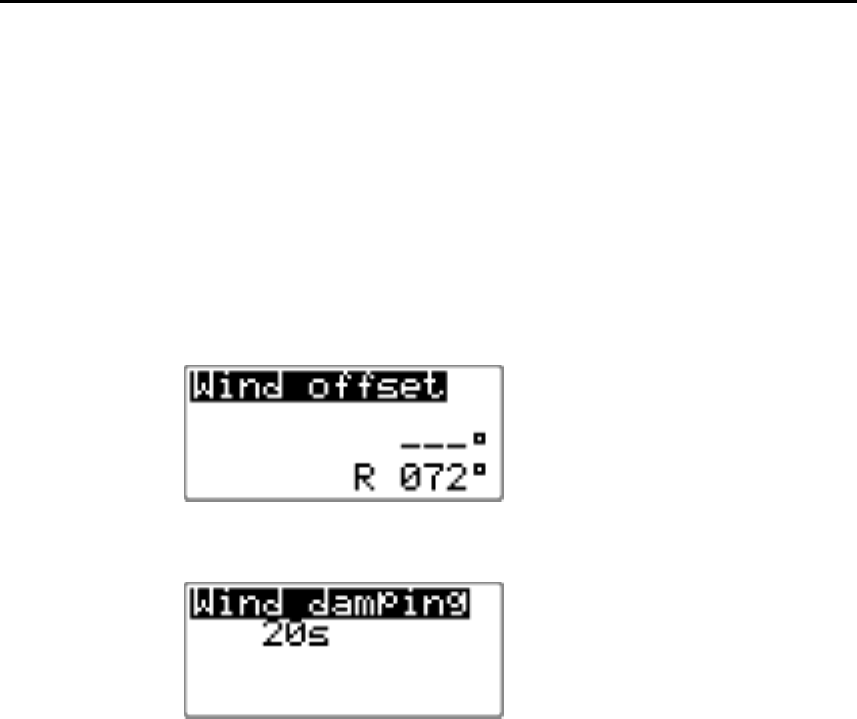
Wind Offset
Note ! This offset only applies if you have a wind transducer directly
connected to SimNet (IS12TW) or a wind transducer that outputs
data on NMEA2000 format.
The Wind Offset feature allows you to correct for a fixed wind
angle offset. Steer the boat directly into the wind with a damping
of 15s. Keep the bow a steady heading for 15-20 sec. and read
the wind angle. If necessary turn the course knob to input an off
set that makes the display read Wind 000°.
The Offset value can be either
positive or negative.
Wind damping
Damping of the apparent wind
angle is made by the Advanced
Wind Filter (AWF) in the
Autopilot Computer.
The inputs to the AWF are heading, boat speed, apparent wind
angle and wind speed. Verify that these inputs are available in
User Setup/Source Select.
Heading sensors, speed sensors and wind sensors have variable
performance. The measured wind angle can be very erratic when
the boat is rolling heavily. In such conditions the AWF gives a
better result when the calculations are based more on heading
and boat speed inputs to achieve the correct apparent wind angle.
Increasing the ‘Wind damping’, will make the AWF depend
more on heading and boat speed to calculate the correct apparent
wind angle. Decreasing the ‘Wind damping’, will make the
AWF depend more on the “raw” apparent wind angle data.
The boat speed input to the AWF is primarily Speed Over
Ground (SOG). If this is not available, the AWF will use speed
through water. If none of these are available, the AWF will use a
boat speed that is 1.5 times the the Transition Speed set in the
Installation/Seatrial menu.
Range: 1 – 100 seconds
Default: 15 seconds