


















38
4. Suppressing Effects of Pitching and Rolling
The Motion Sensor MS-100 (option) compensates for the effects of
pitching and rolling to provide stable sonar pictures. You may enable
it as follows:
1. Press the [MENU] key to display the SCAN menu.
2. Use the RANGE control to select RANGE/BEARING.
3. Use the GAIN control to select STAB.
4. Press the [MENU] key to close the menu.
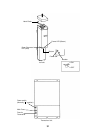
5. Operate the trackball to place the trackball mark on the bearing
you want to compensate by the MS-100.
6. Press the [R/B] key. A dashed line appears at the bearing selected
at step 5. The rolling and pitching of the ship in the direction of
the bearing mark is compensated, by automatically adjusting the
tilt angle.
Picture in direction
selected with bearing
mark is compesnated.
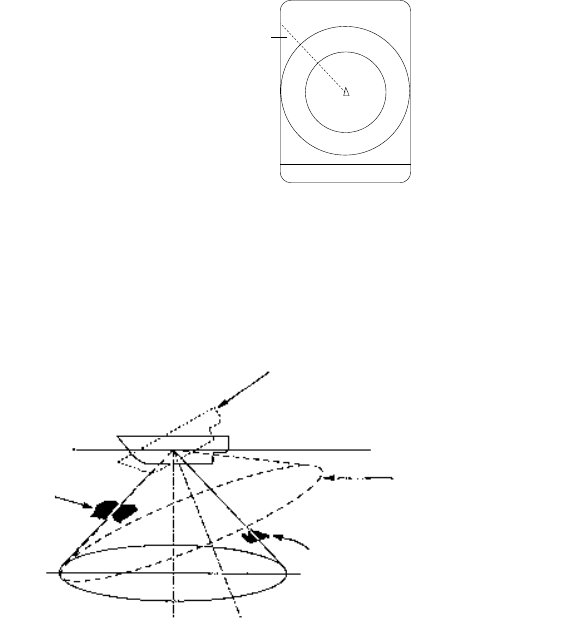
Note: The entire picture is not compensated in the full-circle scan-
ning; the tilt angle for each bearing cannot be changed. Only
one bearing is compensated and bearing error will result for
any bearing not stabilized.
Tilting in bow direction
Bearing mark at 0°
(bow direction);
beam stabilized
Echo not captured
by beam
Echo captured
by beam
Tilt can be controlled manually from 0° to 55°, however rolling and
pitching are compensated from -5° to 55° with the tilt angle at ±20°.