



















SECTION 5—PERFORMANCE ADJUSTMENTS
Part No 1110532 23 MK
5
™NX™Electronics
Performance Menu Description
The performance adjustment menu items are listed below with a description of each
function.
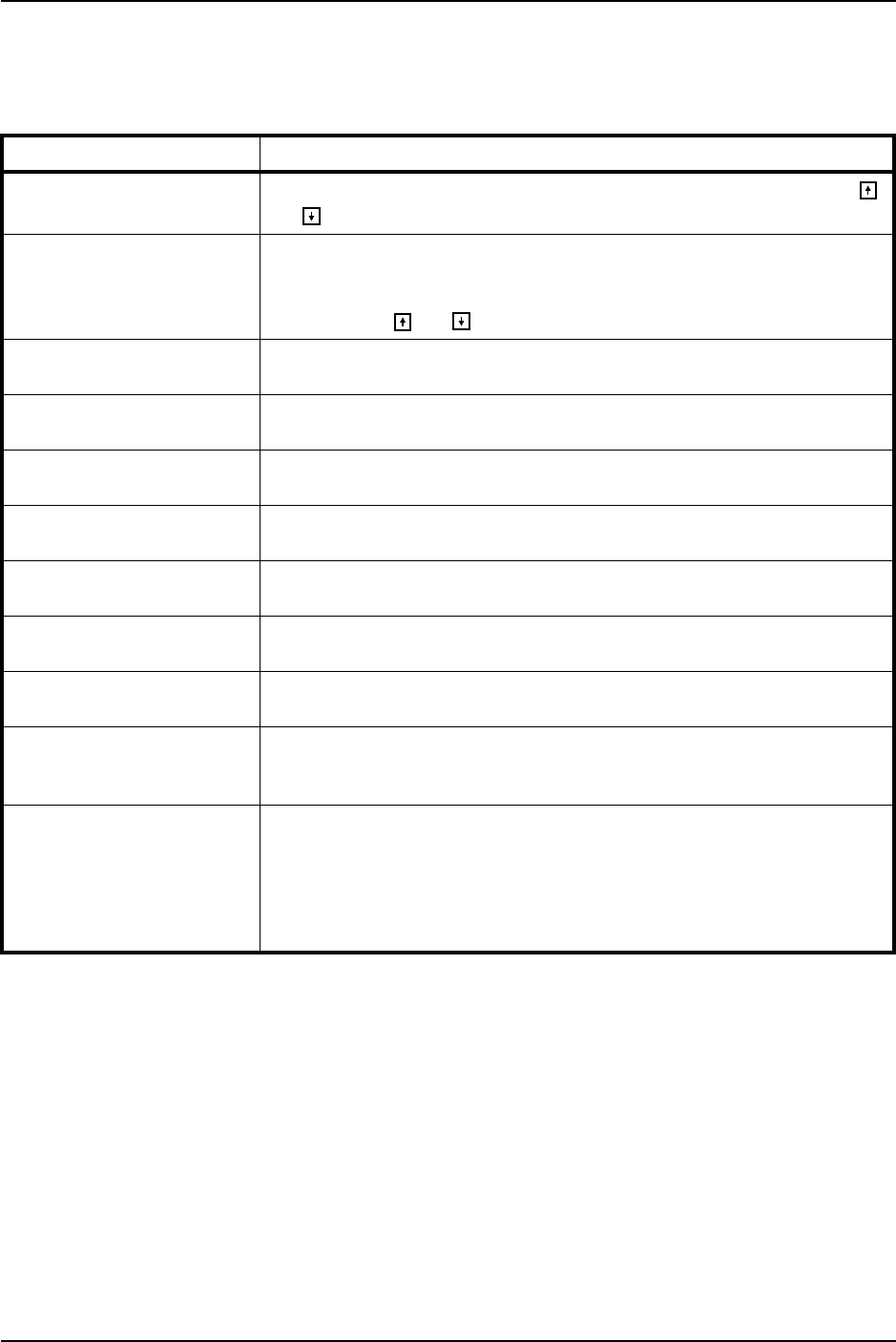
MENU ITEM DESCRIPTION
FORWARD SPEED
Sets the maximum forward speed. The fastest speed setting is 100%. Use the
and keys to change the value.
TURNING SPEED Sets the TURNING SPEED as a percentage of the maximum forward speed. The
turning speed is independent of the forward speed setting so that the turning
speed can be greater than the forward speed. The fastest turning speed setting
is 60%. Use the and keys to change the value.
ACCELERATION - FWD ACCELERATION - FWD sets how quickly the controller will accelerate when
the joystick is moved forward from neutral.
ACCELERATION - REV ACCELERATION - REV sets how quickly the controller will accelerate when
the joystick is moved to the rear from neutral.
TURN
ACCELERATION
TURN ACCELERATION sets how quickly the controller will accelerate when
the joystick is moved to the left or right from neutral.
TURN
DECELERATION
TURN DECELERATION sets how quickly the controller will decelerate when
the joystick is moved to the left or right from neutral.
BRAKING FORWARD BRAKING FORWARD sets how quickly the controller will decelerate when the
joystick is moved toward neutral from a forward position.
BRAKING REVERSE BRAKING REVERSE sets how quickly the controller will decelerate when the
joystick is moved toward neutral from a reverse position.
REVERSE SPEED The maximum speed the controller will drive with the joystick full reverse and
the speed pot fully clockwise.
TREMOR DAMPENING As the wheelchair approaches a required speed (determined by joystick
position) acceleration/deceleration will reduce. A higher value will soften the
transition from acceleration/deceleration to that speed.
TORQUE This parameter allows the controller to compensate appropriately for adverse
driving conditions, for example when going over curbs and ramps. It is the
parameter that optimizes the driving performance of the controller to the
motors being used by setting a specific motor resistance.
The controller will not control the wheelchair correctly unless this is carefully
set.