









E6581090
K-11
11
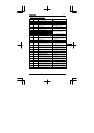
■Table of input terminal functions 3
58
SS1+AD2
Combination of preset speed command
1 and acceleration/deceleration 2
ON : Simultaneous input of SS1 and
AD2 commands
57
SS2+AD2
Combination of preset speed command
2 and acceleration/deceleration 2
ON : Simultaneous input of SS2 and
AD2 commands
57
SS3+AD2
Combination of preset speed command
3 and acceleration/deceleration 2
ON : Simultaneous input of SS3 and
AD2 commands
61 SS4+AD2
Combination of preset speed command
4 and acceleration/deceleration 2
ON : Simultaneous input of SS4 and
AD2 commands
*2 This function is effective after software version V120.
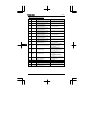
■Table of output terminal functions 1
Function
No.
Code Function Action
0 LL Frequency lower limit
ON : Output frequency higher than setting
OFF : Output frequency equal to or lower than
setting
1 LLN Inversion of frequency lower limit Inverse output of LL
2 UL Frequency upper limit
ON : Output frequency equal to or higher than
setting
OFF : Output frequency lower than setting
3 ULN Inversion of frequency upper limit Inverse output of UL
4 LOW
Low-speed detection signal
ON : Output frequency equal to or higher than
setting
OFF : Output frequency lower than setting
5 LOWN
Inversion of low-speed detection
signal
Inverse output of LOW
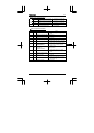
6 RCH
Designated frequency reach
signal (completion of
acceleration/deceleration)
ON : Output frequency within command frequency
±2.5Hz
OFF : Output frequency exceeding command
frequency ±2.5Hz
7 RCHN
Inversion of designated
frequency reach signal (inversion
of completion of
acceleration/deceleration)
Inverse output of RCH
8 RCHF Set frequency reach signal
ON : Output frequency within setting
±2.5Hz
OFF : Output frequency exceeding setting
±2.5Hz
9 RCHFN
Inversion of set frequency reach
signal
Inverse output of RCHF
10 FL Failure FL (trip output) ON : Inverter trips
11 FLN
Inversion of failure FL (inversion
of trip output)
Inverse output of FL
12 OT Over-torque detection
ON : Torque current is held above the torque set
with for a period of time longer than
that set with .
13 OTN
Inversion of over-torque
detection
Inverse output of OT
*2
*2
*2
*2
58
59
60