



















16. NAVIGATION SENSORS
16-10
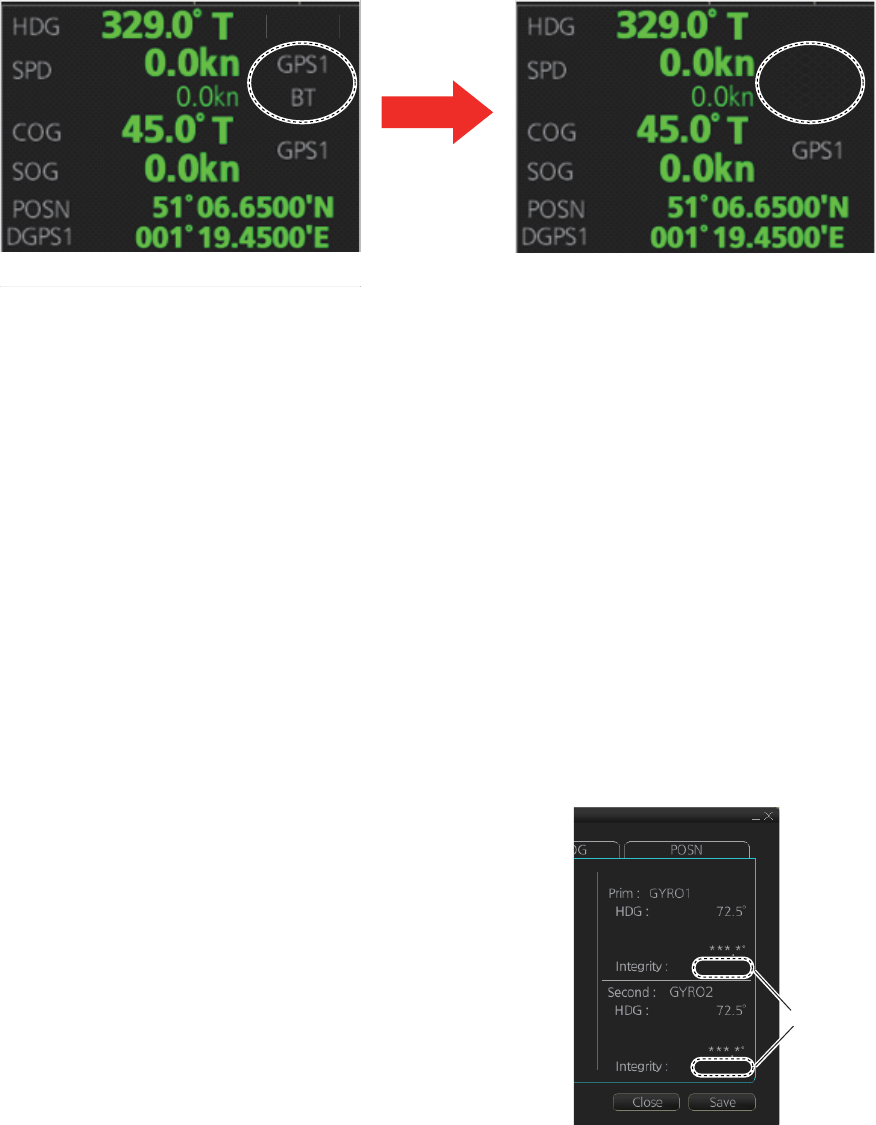
16.6 Switching of Sensor and Indication
When a sensor cannot be used because of some problem, the system automatically
switches the sensor. When this occurs the name of the newly selected sensor appears
in yellow.
16.7 Filter Status
The ECDIS incorporates a filter that receives raw sensor data, checks sensor integrity
and processes multiple sensor data to produce a continuous estimate of ship’s posi-
tion and motion.
By default, the filter uses data from all available sensors for filtering and integrity mon-
itoring. The exception is heading data; only the selected heading device affects the
output of the filter, but other heading sensors (including magnetic compasses) are
used for integrity monitoring.
Sensors may be excluded manually or automatically. An excluded sensor participates
in neither integrity monitoring or filtering. The filter automatically excludes a sensor
from use if the sensor fails the first level of integrity check (for example, if a sudden
jump is detected). If the actual integrity check fails for some reason and the filter is able
to identify the faulty sensor, the faulty sensor is automatically excluded.
Sensor integrity is determined by: (1) monitoring
the statistical accuracy of each sensor inde-
pendently and analyzing the input values and using
the information of the type of sensor, and (2) mon-
itoring the difference between pairs of sensors.
The system checks heading, rate of turn, position,
COG/SOG and CTW/STW data for integrity, in ac-
cordance with INS regulations (IEC-61924-2). The
result is either [Passed], [Doubtful], [Failed], [Ex-
cluded] or [Not Available]. The integrity check re-
sult appears in the following locations:
• [Local Sensor Setting] and [System Sensor Set-
ting] menus. The right figure shows the result for
the heading sensor GYRO1.
• [Filter Status] page in the [Other Sensor Setting] menu. See the next page.
LOG
BT
Speed sensor
changed
G
YR
O1
G
YR
O1
Integrity
check
result
Passed
Corr.: Not Available
Passed
Corr.: Not Available