



















1
1. Overview
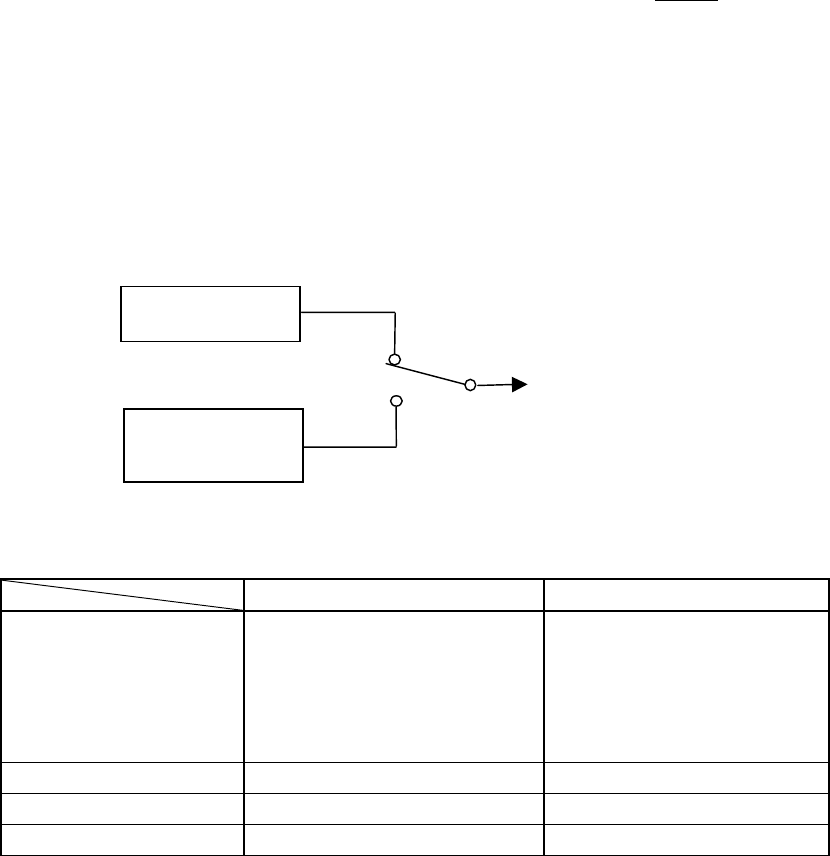
The satellite compass, SC-50/110 calculates the heading by using the carrier signal of the
GPS satellite signals. The system also calculates the heading with three rate sensors. When
the satellite signal is blocked, the system outputs the heading data based on the rate sensor
signal for a maximum of 5 minutes.
The system always compares GPS heading with rate sensor heading. If the difference
between two exceeds the preset value, an alarm is generated.
The system needs about 15 minutes for settling time at GPS cold start: 12 minutes for
cold start and 3 minutes for settling time.
Fig.1
Table below compares SC-50/110 to SC-60/120.
SC-50/110 SC-60/120
Number of output port Heading and NAV
(IEC/AD-10): 5, Interval and
baud rate selectable
Heading (AD-10): 1
Pitch/Roll analog: 1
Heading (IEC/AD-10): 3
NAV: 1 (1 sec/4800 bps)
Output connector Terminal board Waterproof connector
Processor unit W: 300, B: 200, H: 60 W: 335, B: 265, H: 103
Factory-default setting Wall (Bulkhead) mount Floor mount
Output of Heading Data
Heading data is output from HDG OUT ports. Either IEC or AD-10 heading data is
output from HDG OUT 1 to HDG OUT 5 ports according to menu setting. OUTPUT 6
port outputs only AD-10 format heading data. When the port is selected for IEC output,
two receivers are connected to the same port: #1(Data-H) and #2 (Data-C), and #3
(Data-H) and #4(Data-C). Thus, when HDG OUT ports 1 to 5 are used for IEC ports,
10 receivers can be connected to the system. Not only heading data but also NAV data
is output from IEC port.
Difference between 20P8178A and 20P8178B
The MAIN board, 20P8178A is for SC-50 and 20P8178B for SC-110. The board
carries a label “A” or “B.” The difference between A and B is software, but the
program number is the same on top of the program ROM.
GPS Heading
Rate sensor
Heading
Calculated headin
g
data