



















E6581090
F-19
6
6.12 Improving torque and speed characteristics
6.12.1 Setting motor constants
RV
: V/F control mode selection
XN
: Base frequency 1 (Hz)
H
: Slip frequency gain
H
: Base frequency voltage 1 (V) (rated voltage of motor)
★When setting the RV parameter (V/F control mode selection) to 3 (slip correction), adjust
the following parameters, too.
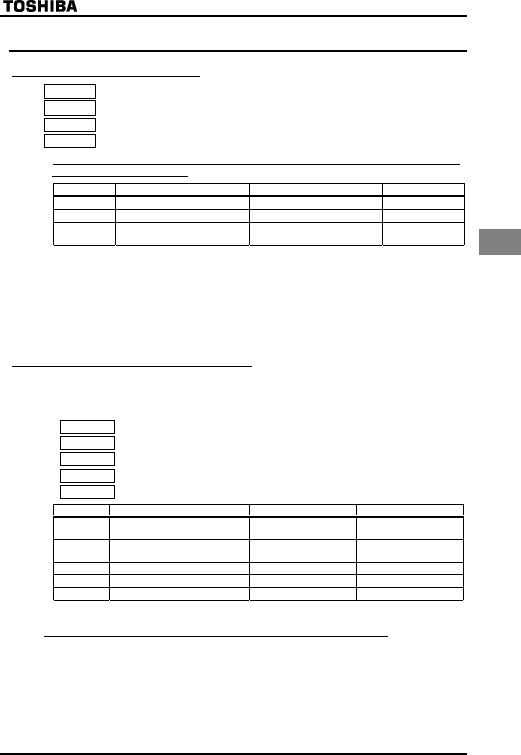
Title Function Adjustment range Default setting
XN
Base frequency 1 (Hz)
25~200 (Hz)
60
H
Slip frequency gain
0~150 (%)
50
H
Base frequency voltage 1 (V)
(rated voltage of motor)
50~500 (V) *
*The value is changed according to the set-up parameter condition. (VFNC1 (S)-□□□□P□-W type)
200 [V] for VFNC1 (S)-□□□□P□ type.
H :Used to set a motor slippage correction factor. There is no need to change the factory
default setting under normal conditions. However, if the motor speed fluctuates considerably
with load fluctuations, increase the gain to reduce fluctuations of the motor speed.
H : Used to set the rated voltage of the motor. There is no need to change the factory default
setting when using ordinary motors. However, when using a motor with a rated voltage and
a base frequency other than 200V-50Hz, 200V-60Hz or 220v-60Hz, enter the rated voltage
of the motor printed on its rating plate, in addition to its base frequency (XN).
6.12.2 Optimizing control characteristics
Although there is no need to change the settings of the following parameters under normal
conditions, control characteristics may be improved by adjusting the parameters according to the
motor specifications and load characteristics.
H
: Motor rated current
H
: Motor no-load current
H
: Motor rated speed
H
: Speed control gain
H
: Speed control stable coefficient
Title FunctionAdjustment rangeDefault setting
H
Motor rated current 0.1-50.0(A)
Depends on the model
(See Section 11.)
H
Motor no-load current 30-80(%)
Depends on the model
(See Section 11.)
H Motor rated speed 100-12000(min
-1
)*
H Speed control gain 0~100(%) 40
H
Speed control stable coefficient
0~100(%)
20
*The value is changed according to the set-up parameter condition. (VFNC1 (S)-□□□□P□-W type)
1710 [min
-1
] for VFNC1 (S)-□□□□P□ type.
★Enabled if the RV parameter (V/F control mode selection) is set to 0 (V/F)
H : Used to adjust the effective response to the frequency command.
• Increase the value to increase response.
• Decrease the value to decrease response.
Adjust the value in increments of 10 (%) or so while checking the effective response.
H : Used to adjust the effective response to the frequency command.
• Increase the value if overshooting or hunting occurs.
• Increase the value if the speed reducer makes a gear noise.
• Increase the value if overvoltage tripping occurs on completion of deceleration.
Adjust the value in increments of 10 (%) or so while checking the effective response.