



















15. Navigation Sensors
15-7
15.5 Source of Navigation Data
The figure below shows how various sources of navigation data are chosen. "SOG, COG" is speed over ground and
course over ground, respectively. "Speed" is speed over water, "Drift" is the difference between speed over water
and speed over ground. Docking speed components are bow speed (transversal), stern speed (transversal) and center
speed (longitudinal).
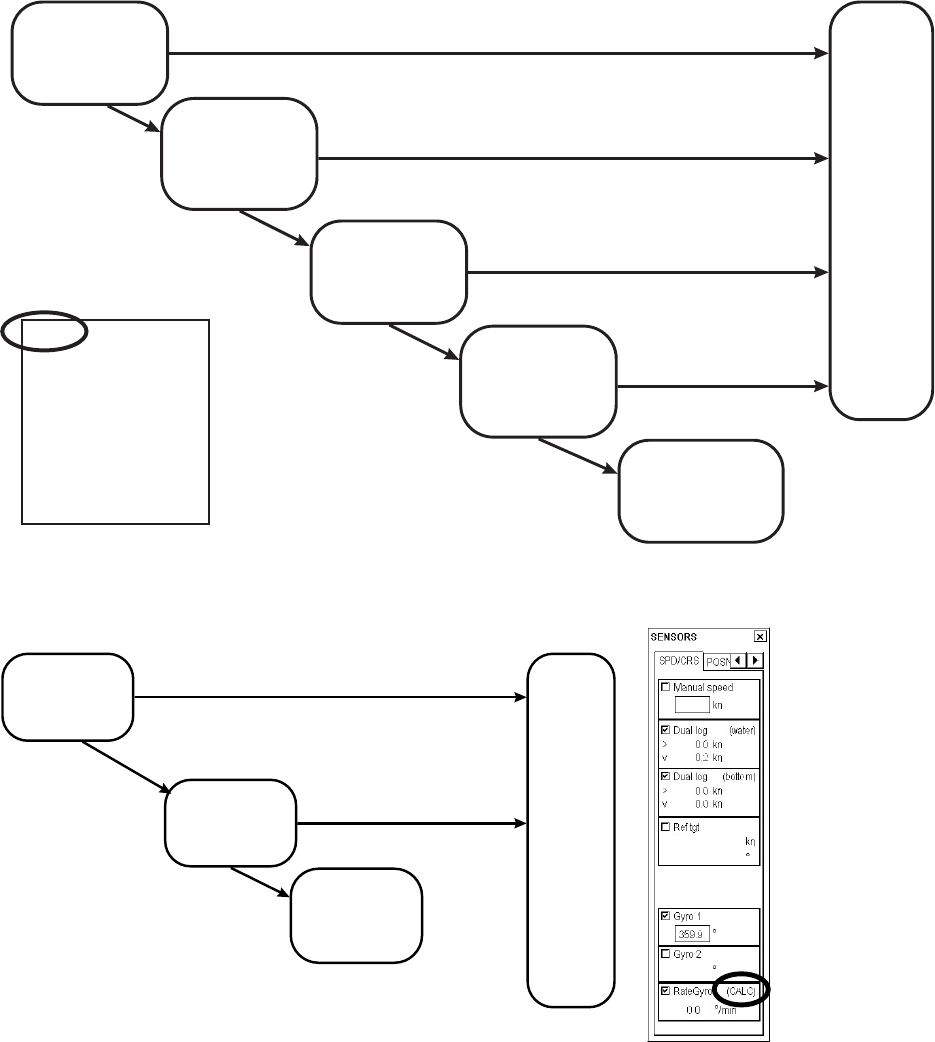
Heading used by the system is shown at the upper right corner of the chart radar display. In the example shown
below, heading is received from a gyrocompass and it is shown without additional text, meaning the value is
referenced to true North. Additional gyro-related text that may appear are "(mag)" if the value is referenced to
magnetic North, "(man)" if the value has been manually entered; or "(corr)", which is displayed in red, if the value
includes gyro correction.
Manual
COURSE
GYRO 1
GYRO 2
GYRO from
RADAR
Alarm 402
No Course
Available
Heading
used by
the system
Selected
Selected and value exists
Available
Selected and value exists
Not selected
Not selected
or no value
Not selected
or no value
Not available
HDG 071.0
°
SPD (WT) 15.6 kn
SB (POSN) 0.0 kn
COG (POSN) 071.0
°
SOG (POSN) 15.6 kn
59
°
31.206'N
024
°
36.731'E
WGS 84
DGPS
ROT used by the system is shown in the Speed/Course page of the Sensors dialog box. The Rate Gyro field shows
the text "(calc.)" when the system calculates ROT from movement of heading. No text is shown when the value is
received from an ROT gyro.
Calculated ROT
from movement
of Heading
Not selected in Installation parameters
Selected in Installation parameters
ROT Gyro
No value
Alarm 718
ROT gyro error
Value exists
ROT
used by
system