



















15. Navigation Sensors
2-9
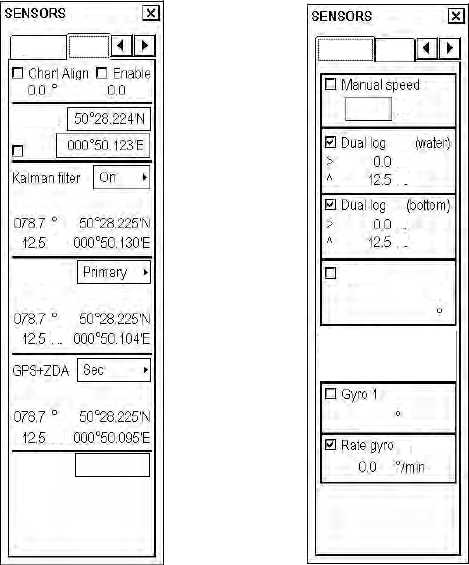
2.5.2 Speed selection for COG and SOG (navigation)
The system speed that is in use for navigation appears at "COG" and "SOG." These values are used for:
• TTG calculation
• Route Monitoring for ETA calculation
• Kalman filter for position calculation
• Dead reckoning for position calculation
Note 1: Availability of sensors for selection from the SENSORS dialog box depends on the devices interfaced with
this system.
Note 2: When the AIS feature is active, MANUAL and REF are not available for selection.
The operator can select the navigation sensors to use for navigation and view their current values on the SENSORS
dialog box. For more information about source of speed used by system, see Chapter 15
1. Put the cursor on the COG or SOG field in the information area then push the right button.
SPD/CRS POSN
DR
LORAN
Off
°
kn
kn
kn
kn
DGPS-1st
NM
Ref tgt
kn
kn
kn
kn
kn
kn
(CALC)
SPD/CRS
POSN
2. Select desired navigation sensors. Use the trackball to select Position sensors (GPS(s) either Primary or
Secondary then push the scrollwheel.
3. Open the SPD/CRS page, select the appropriate log then push the left button. Select among LOG or Dual log
(water): Log, speed thru water (STW) Dual log (bottom), speed over ground (SOG). Note that a log cannot
produce BT (Bottom Tracking) speed in deep waters without set and drift entry.
4. Click the Close window button (X) to close the SENSORS dialog box.
Notes on speed input
• IMO Resolution A.823(19) for TT recommends that a speed log to be interfaced with a TT should be capable of
providing through-the-water speed (forward speed).
• A single-axis water log cannot measure speed when the wind is coming from the leeway direction.