



















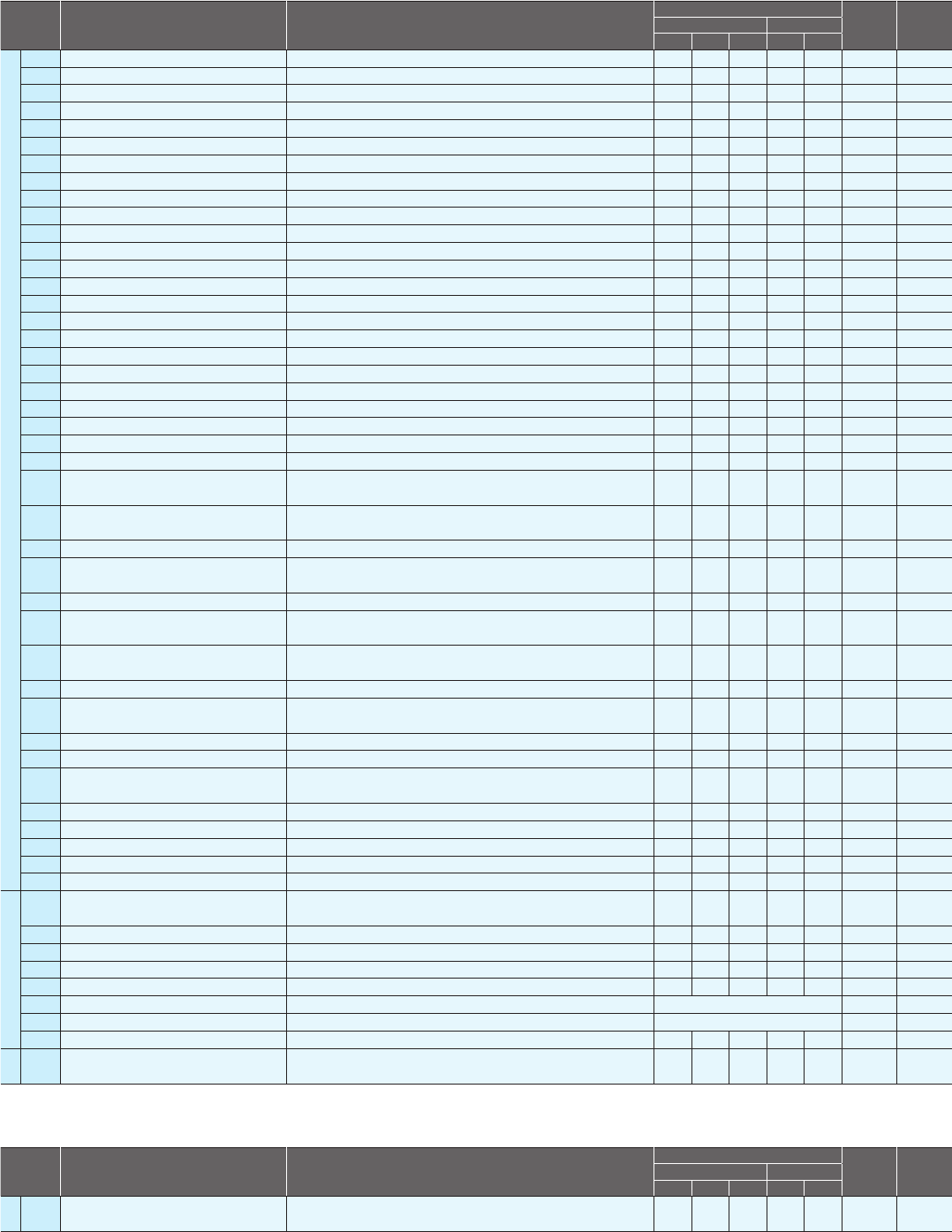
P GROUP: EXPANSION CARD FUNCTIONS
= Allowed
= Not permitted
Code Function Name Monitored data or setting
Default Setting
Setting
during
operation
(allowed or not)
Change
during
operation
(allowed or not)
SJ700/SJ700D(CTmode)
SJ700B
-FE -FU -F -F -FU
Output terminal operation function
P001
Operation mode on expansion card 1 error
00 (tripping), 01 (continuing operation)
00 00 00 00 00
P002
Operation mode on expansion card 2 error
00 (tripping), 01 (continuing operation)
00 00 00 00 00
P011
Encoder pulse-per-revolution (PPR) setting (*1)
128. to 9999., 1000 to 6500 (10000 to 65000) (pulses)
1024 1024 1024 1024 1024
P012
Control pulse setting (*1)
00 (ASR), 01 (APR), 02 (APR2), 03 (HAPR)
00 00 00 00 00
P013
Pulse input mode setting (*1)
00 (mode 0), 01 (mode 1), 02 (mode 2)
00 00 00 00 00
P014
Home search stop position setting (*1)
0. to 4095.
0. 0. 0. 0. 0.
P015
Home search speed setting (*1)
"start frequency" to "maximum frequency" (up to 120.0) (Hz)
5.00 5.00 5.00 5.00 5.00
P016
Home search direction setting (*1)
00 (forward), 01 (reverse)
00 00 00 00 00
P017
Home search completion range setting (*1)
0. to 9999., 1000 (10000) (pulses)
5. 5. 5. 5. 5.
P018
Home search completion delay time setting (*1)
0.00 to 9.99 (s)
0.00 0.00 0.00 0.00 0.00
P019
Electronic gear set position selection (*1)
00 (feedback side), 01 (commanding side)
00 00 00 00 00
P020
Electronic gear ratio numerator setting (*1)
0. to 9999.
1. 1. 1. 1. 1.
P021
Electronic gear ratio denominator setting (*1)
0. to 9999.
1. 1. 1. 1. 1.
P022
Feed-forward gain setting (*1)
0.00 to 99.99, 100.0 to 655.3
0.00 0.00 0.00 0.00 0.00
P023
Position loop gain setting (*1)
0.00 to 99.99, 100.0
0.50 0.50 0.50 0.50 0.50
P024
Position bias setting (*1)
-204 (-2048.) / -999. to 2048
0. 0. 0. 0. 0.
P025
Temperature compensation thermistor enable
00 (no compensation), 01 (compensation)
00 00 00 00 00
P026
Over-speed error detection level setting (*1)
0.0 to 150.0 (%)
135.0 135.0 135.0 135.0 135.0
P027
Speed deviation error detection level setting (*1)
0.00 to 99.99, 100.0 to120.0 (Hz)
7.50 7.50 7.50 7.50 7.50
P028
Numerator of motor gear ratio (*1)
0. to 9999.
1. 1. 1. 1. 1.
P029
Denominator of motor gear ratio (*1)
0. to 9999.
1. 1. 1. 1. 1.
P031
Accel./decel. time input selection
00 (digital operator), 01 (option 1), 02 (option 2), 03 (easy sequence)
00 00 00 00 00
P032
Positioning command input selection (*1)
00 (digital operator), 01 (option 1), 02 (option 2)
00 00 00 00 00
P033
Torque command input selection (*1)
00 (O terminal), 01 (OI terminal), 02 (O2 terminal), 03 (digital operator)
00 00 00 00 00
P034
Torque command setting (*1)
SJ700/SJ700D: 0. to 200. (%) < 75kW and over:0. to 180. (%) >
SJ700B: 0. to 180. (%)
0. 0. 0. 0. 0.
P035
Polarity selection at the torque command
input via O2 terminal (*1)
00 (as indicated by the sign), 01 (depending on the operation direction)
00 00 00 00 00
P036
Torque bias mode (*1)
00 (disabling the mode), 01 (digital operator), 02 (input via O2 terminal)
00 00 00 00 00
P037
Torque bias value (*1)
SJ700/SJ700D: -200. to +200. (%) < 75kW and over:-180. to +180. (%) >
SJ700B: -180. to +180. (%)
0. 0. 0. 0. 0.
P038
Torque bias polarity selection (*1)
00 (as indicated by the sign), 01 (depending on the operation direction)
00 00 00 00 00
P039
Speed limit for torque-controlled operation
(forward rotation) (*1)
0.00 to "maximum frequency" (Hz)
0.00 0.00 0.00 0.00 0.00
P040
Speed limit for torque-controlled operation
(reverse rotation) (*1)
0.00 to "maximum frequency" (Hz)
0.00 0.00 0.00 0.00 0.00
P044
DeviceNet comm watchdog timer
0.00 to 99.99 (s)
1.00 1.00 1.00 1.00 1.00
P045
Inverter action on DeviceNet comm error
00 (tripping), 01 (tripping after decelerating and stopping the motor), 02 (ignoring errors),
03 (stopping the motor after free-running), 04 (decelerating and stopping the motor)
01 01 01 01 01
P046
DeviceNet polled I/O : Output instance number
20, 21, 100
21 21 21 21 21
P047
DeviceNet polled I/O : input instance number
70, 71, 101
71 71 71 71 71
P048
Inverter action on DeviceNet idle mode
00 (tripping), 01 (tripping after decelerating and stopping the motor), 02 (ignoring errors),
03 (stopping the motor after free-running), 04 (decelerating and stopping the motor)
01 01 01 01 01
P049
DeviceNet motor poles setting for RPM
0, 2, 4, 6, 8, 10, 12, 14, 16, 18, 20, 22, 24, 26, 28, 30, 32, 34, 36, 38 (poles)
00 00 00 00 00
P055
Pulse-string frequency scale
1.0 to 50.0 (kHz)
25.0 25.0 25.0 25.0 25.0
P056
Time constant of pulse-string frequency fi lter
0.01 to 2.00 (s)
0.10 0.10 0.10 0.10 0.10
P057
Pulse-string frequency bias
-100. to +100. (%)
0. 0. 0. 0. 0.
P058
Pulse-string frequency limit
0. to 100. (%)
100. 100. 100. 100. 100.
Absolute position control
P060
-
P067
Multistage position setting 0-7 (*1)
Position setting range reverse side – forward side
(upper 4 digits including “-“)
00000
P068
Zero-return mode selection (*1)
00(Low) / 01 (Hi1) / 00 (Hi2)
00 00 00 00 00
P069
Zero-return direction selection (*1)
00 (FW) / 01 (RV)
00 00 00 00 00
P070
Low-speed zero-return frequency (*1)
0.00 – 10.00 (Hz)
0.00 0.00 0.00 0.00 0.00
P071
High-speed zero-return frequency (*1)
0.00 – 99.99 / 100.0 – Maximum frequency setting, 1st motor (Hz)
0.00 0.00 0.00 0.00 0.00
P072
Position range specifi cation (forward) (*1)
0 – 268435455 (when P012 = 02) 0 – 1073741823 (When P012 = 03) (upper 4 digits)
268435455
P073
Position range specifi cation (reverse) (*1)
-268435455 – 0 (when P012 = 02) -1073741823 - 0 (When P012 = 03) (upper 4 digits)
-268435455
P074
Teaching selection (*1)
00 (X00) / 01 (X01) / 02 (X02) / 03 (X03) /04 (X04) / 05 (X05) / 06 (X06) / 07 (X07)
00 00 00 00 00
sequence
P100
-
P131
Easy sequence user parameter U (00)- (31)
0. to 9999., 1000 to 6553 (10000 to 65535)
0. 0. 0. 0. 0.
(*1) SJ700D (VT): Not available (no display)
U GROUP: USER-SELECTABLE MENU FUNCTIONS
= Allowed
= Not permitted
Code Function Name Monitored data or setting
Default Setting
Setting
during
operation
(allowed or not)
Change
during
operation
(allowed or not)
SJ700/SJ700D(CTmode)
SJ700B
-FE -FU -F -F -FU
parameters
U001
-
U012
User selected functions 1-12
no/d001 to P131
no no no no no
23