


















4
PARAMETERS
89
Control mode
4.3.1 What is vector control?
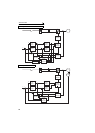
Vector control is one of the control techniques for driving an induction motor. To help explain vector control, the
fundamental equivalent circuit of an induction motor is shown below:
In the above diagram, currents flowing in the induction motor can be classified into a current id (excitation current) for
making a magnetic flux in the motor and a current iq (torque current) for causing the motor to develop a torque.
Motor-generated torque (TM), slip angular velocity (ωs) and the motor's secondary magnetic flux (φ2) can be found by
the following calculation:
r1 : Primary resistance
r2 : Secondary resistance
1
: Primary leakage inductance
2
: Secondary leakage inductance
M : Mutual inductance
S: Slip
id : Excitation current
iq : Torque current
im : Motor current
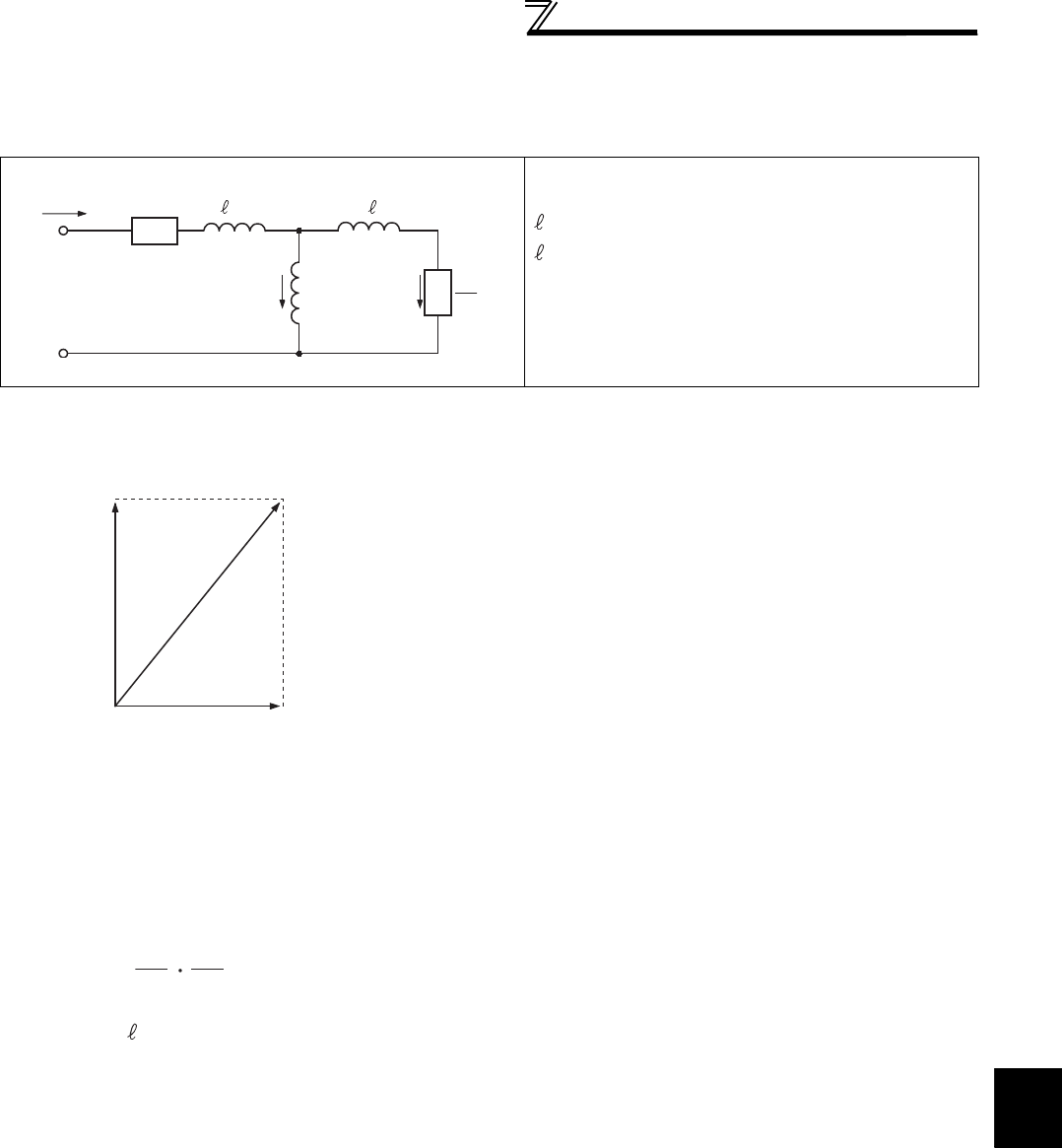
In vector control, the voltage and output frequency are
calculated to control the motor so that the excitation current
and torque current (as shown in the left figure) flow to the
optimum as described below:
(1) The excitation current is controlled to place the internal
magnetic flux of the motor in the optimum status.
(2) Derive the torque command value so that the
difference between the motor speed command and the
actual speed (speed estimated value for Real
sensorless vector control) obtained from the encoder
connected to the motor shaft is zero. Torque current is
controlled so that torque as set in the torque command
is developed.
T
M
∝ φ
2
⋅ iq
φ
2
= M ⋅ id
ωs =
where, L2 = secondary inductance
L2 =
2 + M
Vector control provides the following advantages:
(1) Excellent control characteristics when compared to V/
F control and other control techniques, achieving the
control characteristics equal to those of DC machines.
(2) Applicable to fast response applications with which
induction motors were previously regarded as difficult
to use. Applications requiring a wide variable-speed
range from extremely low speed to high speed,
frequent acceleration/deceleration operations,
continuous four-quadrant operations etc.
(3) Allows torque control.
(4) Allows servo-lock torque control which generates a
torque at zero speed (i.e. status of motor shaft =
stopped). (Cannot be performed under Real sensor-
less vector control.)
1
im
r
1
r
2
S
Mid iq
2
torque current
iq motor current im
excitation current
id
L2
r2
id
iq