



















101
Speed control by Real sensorless
vector control, vector control
4
PARAMETERS
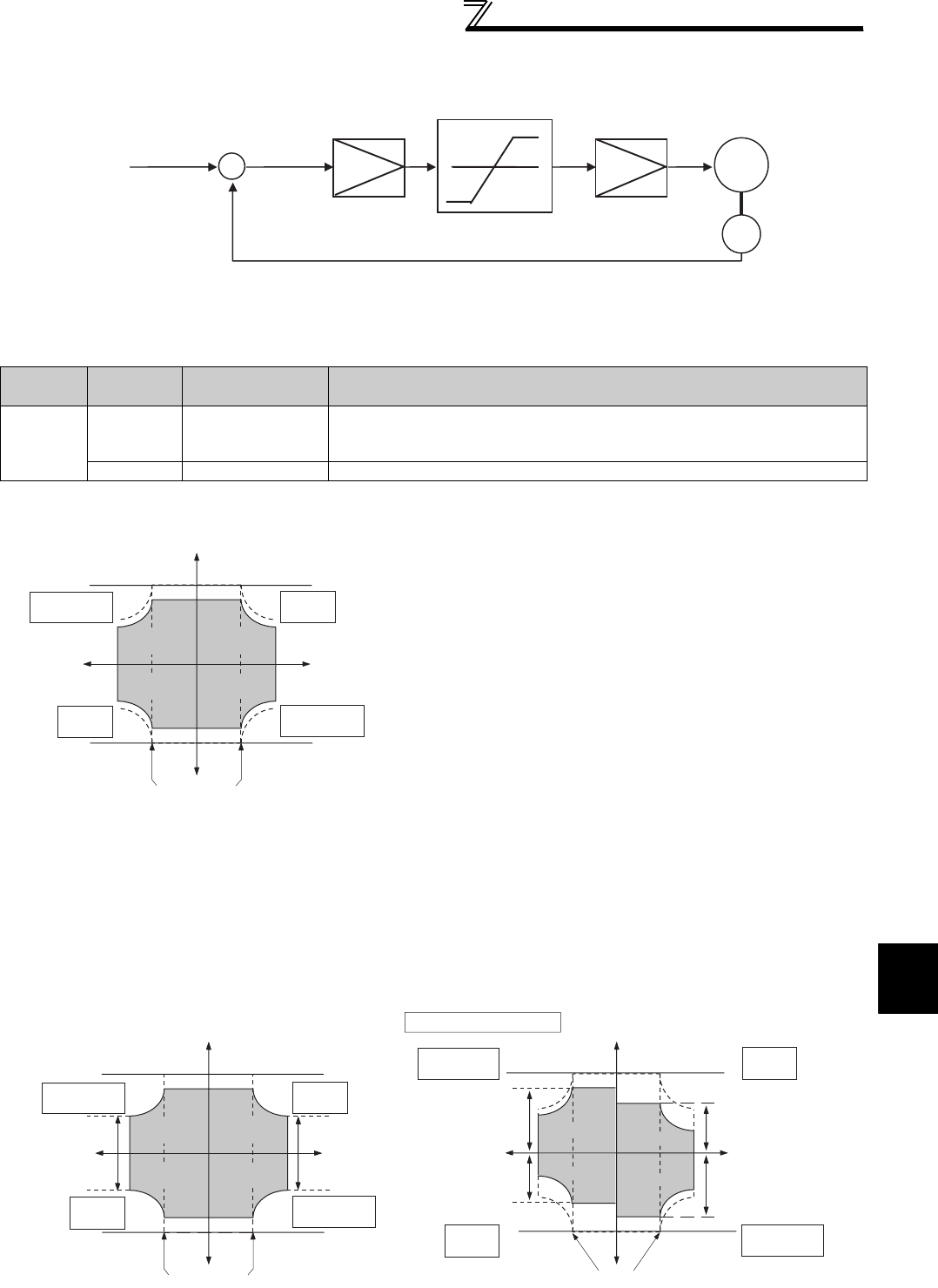
(1) Torque limit block diagram
(2) Selection of torque limit input method (Pr. 810)
⋅ Set Pr. 810 Torque limit input method selection to select the method to limit output torque during speed control.
Torque limit by parameter setting is initially set.
(3) Torque limit level by parameter setting (Pr. 810 = "0", Pr. 812 to Pr. 814 )
(4) Torque limit level by analog input (terminal 1, 4) (Pr. 810 = "1", Pr. 858, Pr. 868 )
Parameter
Number
Setting
Range
Torque Limit Input
Method
Description
810
0 (initial
value)
Internal torque limit
Parameter-set torque limit operation is performed.
Changing the torque limit parameter value by communication enables torque limit
to be input by communication.
1 External torque limit Torque limit using analog voltage (current) to terminal 1 or terminal 4 is enabled.
⋅ With the initial value, limit is made ON all quadrants on the
Pr. 22 Stall prevention operation level (torque limit level) .
⋅ When you want to set the level on a quadrant basis, set the
torque limit level in Pr. 812 Torque limit level (regeneration), Pr.
813 Torque limit level (3rd quadrant), Pr. 814 Torque limit level
(4th quadrant).
When "9999" is set, Pr. 22 is the torque limit level.
⋅ With the upper limit of torque limit as set in Pr. 22, the analog input from terminal 1 input is used as the torque limit
value within the Pr. 22 setting range.
⋅ When torque limit value is input to terminal 1, set "4" in Pr. 868 Terminal 1 function assignment. When torque limit value
is input from terminal 4, set "4" in Pr. 858 Terminal 4 function assignment.
⋅ When Pr. 858="4" and Pr. 868="2," torque is limited by analog input to terminal 1 for regeneration and to terminal 4 for
driving.
⋅ Torque limit by analog input can be calibrated using calibration parameter C16 (Pr. 919) to C19 (Pr. 920), C38 (Pr. 932) to
C41 (Pr. 933) . (Refer to page 300)
* Analog input (terminal 1, 4) or internal torque control (
Pr. 22
etc.) whichever is smaller
Torque limit
<Vector control>
Speed control
Speed command
+
-
Iq current control
IM
Encoder
quad1
(Pr. 22)
quad4
(Pr. 814)
(Pr. 813)
quad2
(Pr. 812)
Reverse
rotation
Forward
rotation
Torque limit
Speed
Reverse
driving
Reverse
regeneration
Rated speed
quad3
+
-
Forward
regeneration
Forward
driving
*
*
*
*
quad1
(Pr.22)
quad4
(Pr.814)
(Pr.813)
quad2
(Pr. 812)
Reverse
rotation
Forward
rotation
Torque limit
Speed
Reverse
driving
Reverse
regeneration
Rated speed
quad3
+
-
Forward
regeneration
Forward
driving
When Pr.858=4, Pr.868=2
quad1
quad4
quad2
Reverse rotation
Forward rotation
Torque limit
Rated speed
+
-
Terminal 1 input or
internal torque limit
(Pr.22 etc.) whichever
is smaller
Speed
quad3
Reverse
regeneration
Reverse
driving
Forward
driving
Forward
regeneration
Terminal 4 input or
internal torque limit
(Pr.22 etc.) whichever
is smaller
Terminal 4 input or
internal torque limit
(Pr.22 etc.) whicheve
r
is smaller
Terminal 1 input or
internal torque limit
(Pr.22 etc.) whichever
is smaller