



















3. ADJUSTMENTS AND CHECKS
3-5
Heading correction at the motion sensor
Heading correction at the motion sensor is done with [Heading Adjust 2] on the [Oth-
ers] menu.
• If the control box is mounted on the hull unit, set the same heading correction as
entered for [Heading Adjust 1] (in [Others] menu).
• If the control box is mounted independent of the hull unit, set the angle measured
from the bow in the clockwise direction. The angle is 0° degrees if the lid of the con-
trol box is directed toward ship’s stern precisely.
• If the motion sensor is a GPS gyro, set 0°.
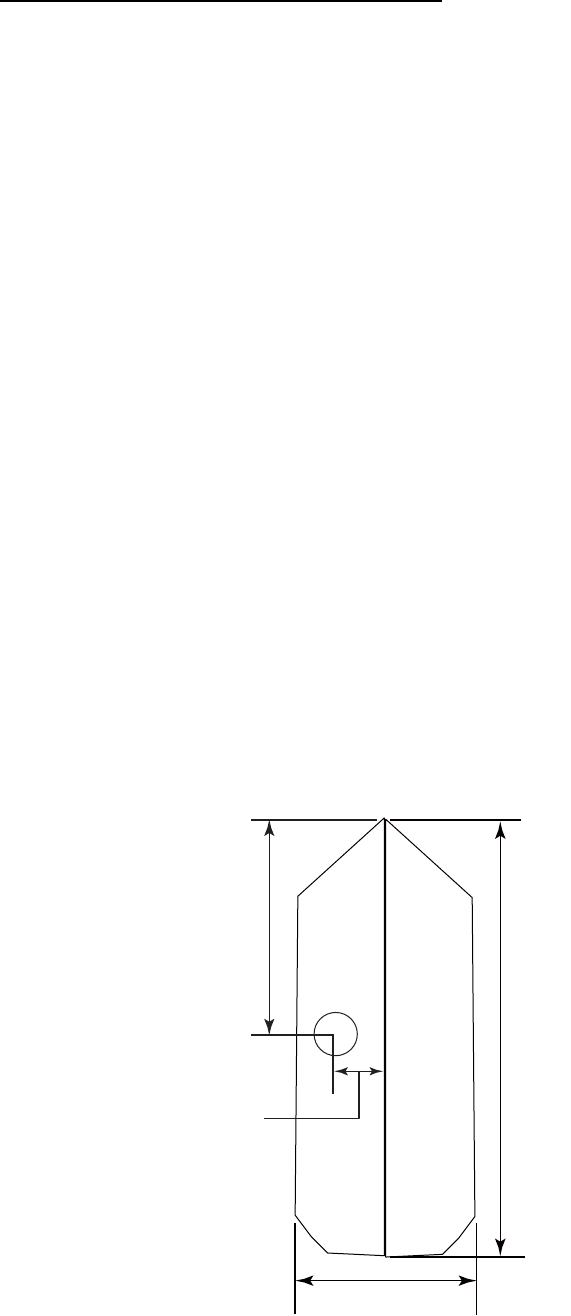
3.5 How to Configure the Own Ship Mark
Set your ship’s length and width and the position of the transducer, to accurately dis-
play the own ship mark on the screen.
1. Open the [System] menu.
2. Select [Own Ship Mark] then left-click.
3. Select [Ship’s Length] then left-click.
4. Use the scrollwheel to set length. The setting range is 15 to 150 m.
5. Set ship’s width and transducer positions similarly.
• [Ship’s Width]: The width of the ship at its widest point. (Setting range: 5 to 30
m)
• [TD Position 1]: Distance from transducer to bow. (Setting range: 5 to 50 m)
• [TD Position 2]: Distance from transducer to keel. Select “+” for starboard, “-”
for port. (Setting range: -10 to 10m)
6. Long-press the MENU/ESC key to close all menus.
TD Position 1
Ship’s
Length
Ship's Width
TD Position 2
(Negative value
for port)