



















Manuale Operativo del G PILOT 3100
NAVMAN
18
Il G-PILOT 3100 dispone di tre modi di governo per l’imbarcazione: bussola, GPS e vento. Per
selezionare un modo appropriato, consultare la sezione 2-4. Nel modo GPS, il G-PILOT utilizza i dati
provenienti da un GPS per governare l’imbarcazione lungo una rotta o fi no ad un punto intermedio.
5-1 Dati di navigazione del GPS
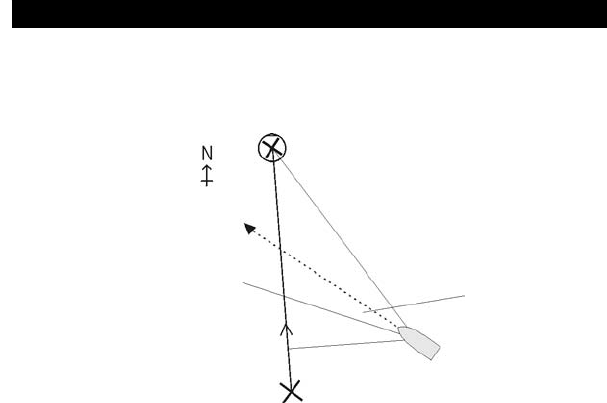
Esempio di navigazione fi no ad un punto intermedio:
Destinazionen
DTG (distanza)
TTG (tempo)
BRG (rilevamento)
SOG (velocità)
Errore di percorso
(angolo)
CTS (rilevamento)
Rotta tracciata
Imbarcazione
XTE (distanza)
Partenza
L’imbarcazione sta navigando dal punto di partenza a quello di destinazione e si è allontanata
dalla rotta tracciata del GPS dal punto di partenza al punto di destinazione:
BRG Bearing to destination Il rilevamento fi no al punto di destinazione a partire
dall’imbarcazione.
COG Rotta al di sopra del fondale Direzione nella quale l’imbarcazione si sta movendo al di
sopra del fondale.
Course error La differenza tra CTS e la direzione dell’imbarcazione.
CTS Course to steer Rotta ottimale da seguire per ritornare alla rotta
tracciata.
DTG Distance to go Distanza dall’imbarcazione alla destinazione.
SOG Speed over ground La velocità attuale dell’imbarcazione al di sopra del fondale.
Essa non corrisponde necessariamente alla velocità
dell’imbarcazione sull’acqua, né alla velocità alla quale
l’imbarcazione si sta avvicinando alla destinazione.
TTG Time to go Il tempo stimato per raggiungere la destinazione.
XTE Cross track error La distanza dall’imbarcazione al punto più prossimo della
rotta tracciata. XTE può essere associato ad una lettera: R
signifi ca dirigere l’imbarcazione verso destra per ritornare
alla rotta tracciata, L signifi ca dirigere l’imbarcazione verso
sinistra.
5 Modo di governo del GPS
COG (rilevamento)