



















Manuale Operativo del G PILOT 3100
NAVMAN
29
Problema: dopo una corrente o un vento laterali, la correzione viene applicata troppo
velocemente o troppo lentamente.
Se l’imbarcazione incontra una forza laterale, uscirà dalla rotta lateralmente. Il G-PILOT riporterà
automaticamente l’imbarcazione sulla direzione corretta, modifi cando di pochi gradi l’impostazione
del timone, secondo un’operazione defi nita assetto. Il guadagno di assetto stabilisce la velocità con
la quale viene applicato l’assetto. Il guadagno di assetto dovrebbe essere regolato per compiere
l’assetto dell’imbarcazione in circa un minuto. Potrebbe risultare diffi cile impostare correttamente
il guadagno di assetto per un’imbarcazione specifi ca; è inoltre facile modifi care eccessivamente il
guadagno di assetto. All’inizio, modifi care le impostazioni lentamente e secondo la, fi no a quando
non si sono apprese le impostazioni corrette.
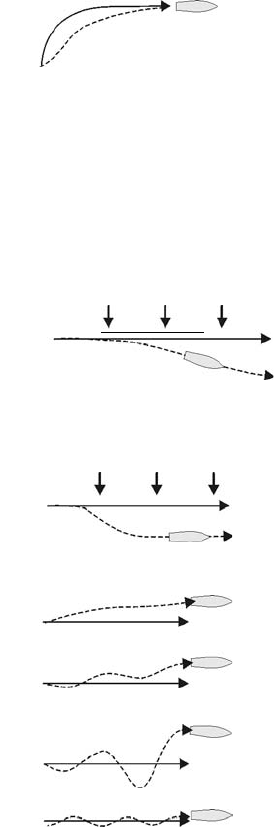
Aumentare il guadagno di assetto
Ridurre il guadagno di assetto
1 minuto
1 minuto
a L’imbarcazione impiega molto più di un minuto per compiere l’assetto.
Inizia ad agire una forza laterale
b L’imbarcazione impiega molto meno di un minuto per compiere l’assetto
Inizia ad agire una forza laterale
Problema: successivamente a un grosso cambiamento di rotta, l’imbarcazione impiega
troppo tempo per stabilizzarsi su una nuova rotta.
Ridurre il guadagno del controtimone
Problema: l’imbarcazione oscillava interno alla rotta del GPS
Ridurre il guadagno del GPS.
o
Aumentare il guadagno del GPS.
Problema: l’imbarcazione si allontana dalla rotta del GPS
o