



















15. Navigation Sensors
15-4
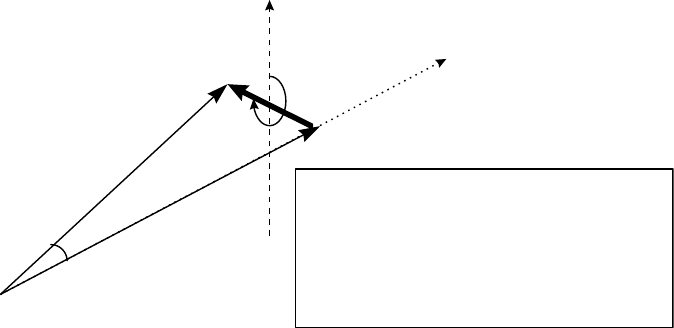
HDG
spd
SOG
COG
a
n
g
l
e
crs
SPD: water speed
HDG: heading of ship
SOG: speed over ground
COG: course over ground
spd: speed of drift
crs: course of drift
angle: difference between HDG and COG
North
SPD
15.2 Source of Position
The figure below shows how source for position is chosen. The Kalman filter uses all position sensors that have
either primary or secondary as input for its calculation. DGPS and SYLEDIS position sensors are considered more
accurate than other position sensors.
The latitude and longitude position is shown at the upper right corner on the chart radar display, and in the example
below the position source is DGPS. Other indications that may be displayed in the position area are as follows:
• NO POSIT: Appears (in red) when no dead reckoning sensors are chosen and valid.
• DEAD REC: Shown (in red) when position source is dead reckoning.
• DGPS, GPS: LORAN, DECCA or SYLEDIS: Name of position source.
• LOST DGPS: Shown (in red) when the user-selected DGPS device has lost the DGPS signal.
• FIL LOST DGPS: Shown (in red) when the Kalman filter is in use and the user-selected DGPS device has lost
the DGPS signal.
• FILTER HIGH: Shown when the position source is the Kalman filter with high-precision position sensor.
• FILTER: Shown when position source is the Kalman filter without high-precision position sensor.
• BAD FILTER: Shown (in red) when position source is the Kalman filter and the filter has excluded at least one
of the chosen sensors because of poor accuracy.