



















Simrad AP25 Autopilot
124 20221495F
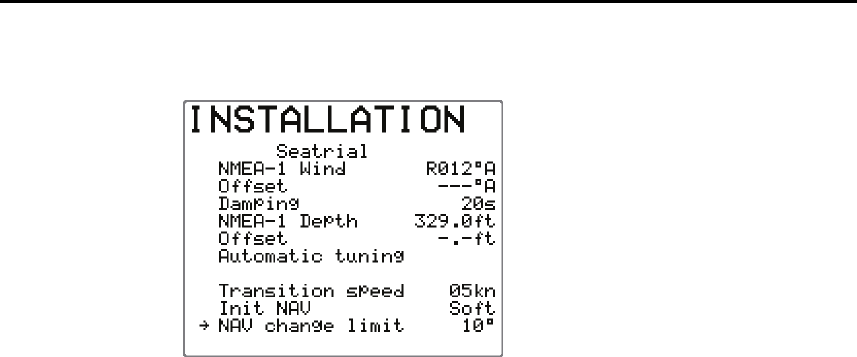
NAV change limit
In NAV mode, when the
required course change at the
approaching waypoint is
bigger than the set limit, you
are prompted to verify that the
upcoming course change is
acceptable. The limit can be
set to 10°, 20° or 30°.
Default: 10°
Rudder play compensation.
(Only applicable when configured for Virtual feedback)
Notes!
1. To obtain the best possible steering performance the said
procedures must be performed in the following order:
- Perform an autotune at 6-8 knots in calm sea.
- If necessary fine tune the Counter Rudder parameter (see
page
126) at cruising speed (LO value) and at slow speed
(HI value)
- Use the response control to obtain the best possible course
keeping (page
56).
2. If the autopilot performance is found satisfactory when the
above has been completed, skip the following rudder play
compensation procedure. The rudder play compensation
procedure is only necessary if the steering gear is sloppy.
Using this procedure when not required may interfere with
the steering algorithms and result in poorer steering instead
of providing improvements.
A play in the steering gear will always reduce the steering
performance of the autopilot. The best result is obtained when
sloppy linkages are repaired and this is the recommended course
of action.
Note ! With a rudder feedback unit installed the effect of the rudder
play is significantly lessened.
When rudder play still exists and there is no feedback unit
installed, the autopilot will need some assistance from the
installer to compensate for this. The effect of the rudder play is