



















11. CUSTOMIZING YOUR UNIT
11-5
[RESTART GPS]: Restart reception of GPS satellites.
[NAVIGATION SPEED]: Set different dynamic platform models to adjust the naviga-
tion engine to the expected application environment. [Low] corresponds to pedestrian
dynamic platform model. For applications with low acceleration and speed. [High] cor-
responds to at sea dynamic platform model. Recommended for applications at sea.
[DIFFERENTIAL CORRECTION]: Turn GPS differential correction on or off. The cor-
rection is made with SBAS (WAAS, EGNOS, MSAS).
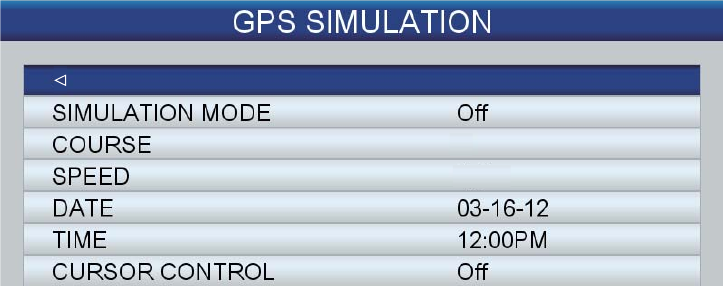
[GPS SIMULATION]: Set up the GPS simulator.
[SIMULATION MODE] activates or deactivates the GPS simulation mode. Set the
course, speed, date and time. [CURSOR CONTROL] allows control of the simulation
speed and course with the arrow keys. Use the up and down arrows to control speed;
the right and left arrows to control course.
[FISH FINDER SIMULATION]: Activate or deactivate the fish find simulator. [Demo1]
is a shallow water simulator and [Demo2] is a deep water simulator.
0°
1.0 kn