



















16. NAVIGATION SENSORS
16-11
The methods of integrity monitoring are outlined in the table below.
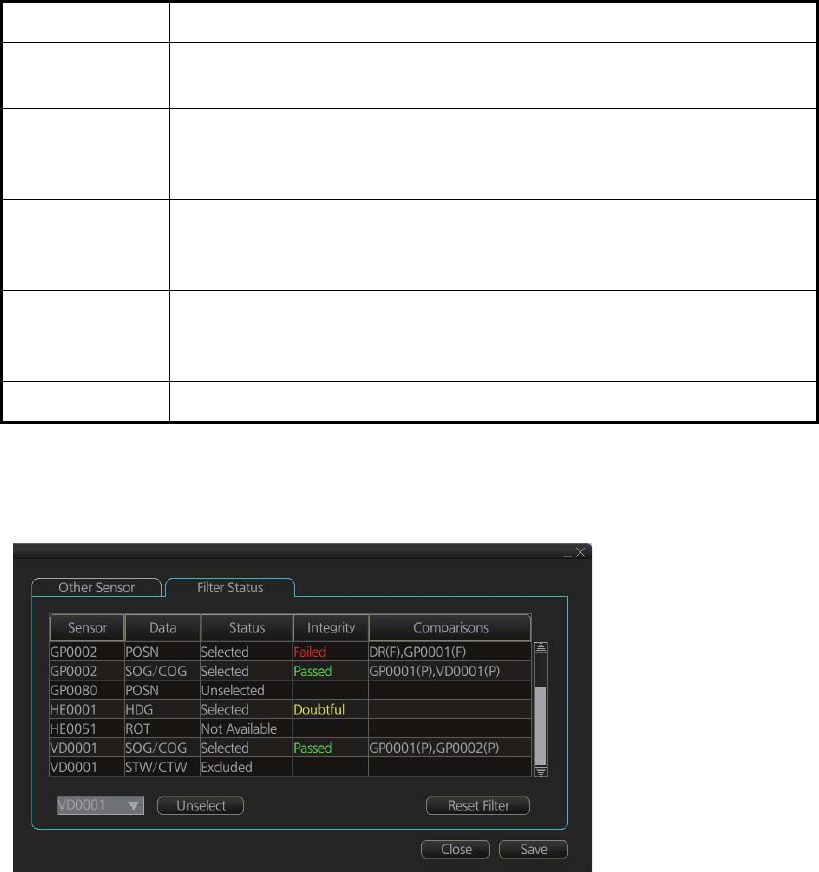
The status and integrity of all sensors can be monitored from the [Filter Status] page
in the [Other Sensor Settings] menu. Sensors can also be unselected and the filter re-
set from this page.
The [Status] column indicates sensor status as follows:
• [Selected] (sensor selected for use in filter)
• [Unselected] (sensor not used in filter)
• [Not Available] (no sensor information)
• [Excluded] (automatically excluded sensor)
The [Integrity] column indicates sensor integrity as either [Passed] (green characters)
or [Failed] (red characters). The integrity evaluation is [Doubtful] (yellow characters)
when there are no other sensors to compare with.
The [Comparisons] column shows the sensors compared and the integrity evaluation
of compared sensors in parentheses. Using the illustration above as an example,
SOG/COG data fed from GP0002 is compared with the sensors GP0001 and VD0001.
The integrity evaluation for the compared sensors is [Passed].
To unselect a sensor manually, select the sensor from the drop-down list at the bot-
tom left corner of the page, click the [Unselect] button then click the [Save] button. [Un-
selected] appears in the [Status] column. To reselect an unselected sensor, select the
Sensor Comparison
Position • Comparison with other position sensors.
• Comparison with dead reckoning position.
Heading • Comparison with other heading sensors.
• Comparison with a COG sensor (used only if other heading sen-
sors are not available and if COG is high enough).
Speed over the
ground
• Comparison with other SOG sensors.
• Comparison with water speed sensors is a secondary option (used
only if other SOG sensors are not available).
Speed through
the water
• Comparison with other STW sensors.
• Comparison with STW sensors is a secondary option (used only if
other STW sensors are not available).
Rate of turn • Comparison with other rate of turn sensors.