



















11. How to Monitor Routes
11-7
11.7 How to Monitor a Route
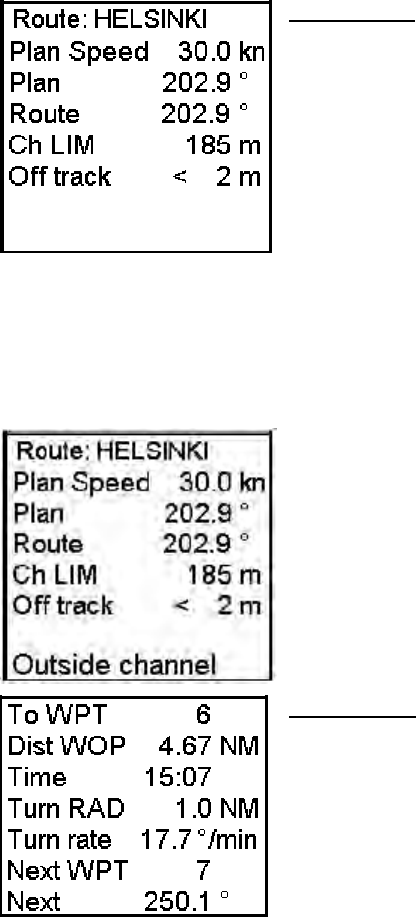
You can monitor the route from the two Plan Speed windows in the information area.
Upper window
• Plan Speed: Planned speed to approach "To WPT".
• Plan: Planned course between previous WPT and "To WPT". Note that if
the gyro value is compensated and Gyro error correction and Gyro error
compensation have been enabled in Ship and Route parameters in the Initial
Settings menu, then the text "(corr)" appears (in red) in the Plan field.
• Route: Calculated set course to follow the monitored route, including off
track, drift and gyro error compensation.
• Ch LIM: Planned width of channel to approach "To WPT".
• Off track: Perpendicular distance of the ship from the track.
Below is an example with
additional text information
Permanent alerts are available regardless of the steering mode used and these are
as follows:
• "Outside channel" is indicated by showing "Off track" in orange and its
value in red.
Lower window
• To WPT: The waypoint that the ship is approaching.
• Dist WOP: Distance to the point where rudder order for course change at
"To WPT" will be given.
• Time: Time remaining until WOP (dd:hh:mm:ss).
• Next WPT: The WPT following the "To WPT".
• Next: Planned course to steer after "To WPT". Note that if the gyro value is
compensated and Gyro error correction and Gyro error compensation have
been enabled in the Ship and Route parameters in the Initial Settings menu,
then the text "(corr)" appears (in red) in the Plan field.
• Turn RAD: Planned turning radius at "To WPT".
• Turn rate: Calculated rate of turn, which is based on current speed and
planned turning radius.