



















15. Navigation Sensors
2-41
2.30 Reference Position
The reference position for measurements (range, bearing, etc.) and markers (heading line, stern mark, etc.) can be
antenna position or consistent common reference point (CCRP), which is a location on own ship to which all
horizontal measurements, for example range, bearing, relative course, relative speed, closest point of approach
(CPA) or time to closest point of approach (TCPA), are normally referenced.
To select reference position, left-click the REF POINT indication at the top of the screen to select ANT or CCRP as
applicable.
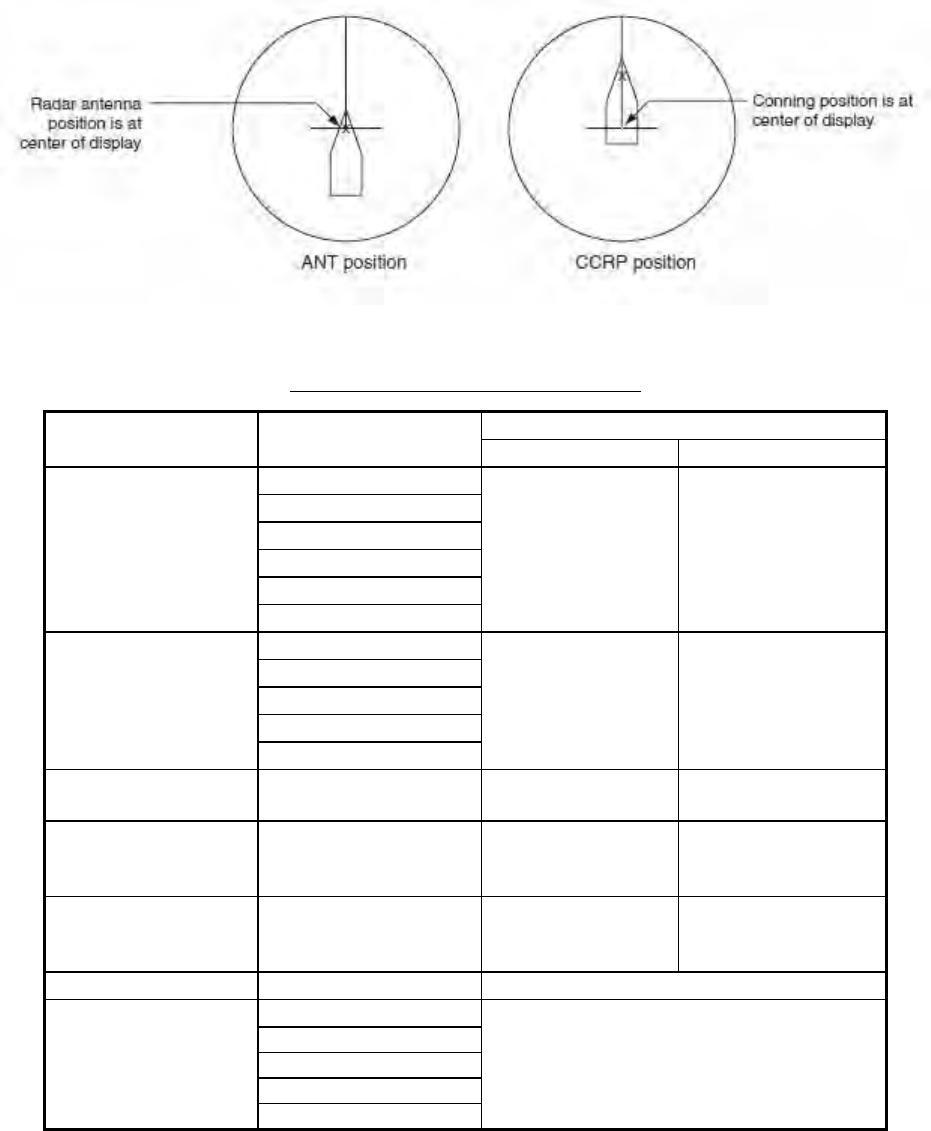
The position of the own ship marker changes according to reference position as shown below. If the CCRP is
positioned outside of the effective display area, the bearing scale is indicated with the appropriate reduced detail.
Range and bearing are measured and graphics are drawn according to reference position as in the table below.
Markers, measurements and reference point
Reference point
Category Item
CCRP Antenna position
EBL
VRM
Cursor
PI line
Range ring
Range and bearing
measurement
Drop mark
Range and bearing
measured from CCRP
Range and bearing
measured from antenna
position
Heading line
Stern mark
Beam line
Own ship vector
Graphics
Own ship track
Drawn from CCRP Drawn from antenna
position
Bearing cursor Drawn with CCRP at
center
Drawn with antenna
position at center
Course, speed Calculated with
CCRP at center
Calculated with
antenna position at
center
CPA, TCPA Calculated with
CCRP at center
Calculated with
antenna position at
center
BCR, BCT Calculated from bow position
Heading
Speed
Course over ground
Speed over ground
Own ship data
Own L/L
Data from sensor, regardless of reference point
selected