



















Simrad EQ60
80
857-164342 / Rev.C
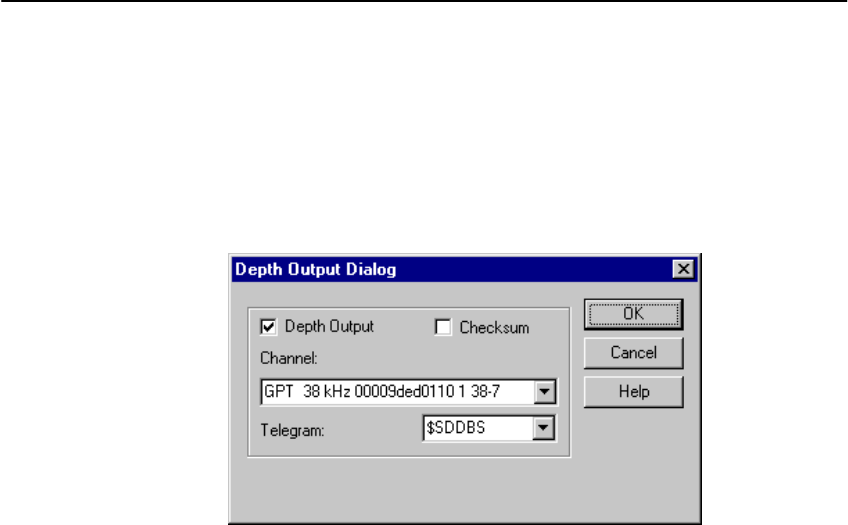
Depth Output
The Depth Output dialogue box is called from the Heave
Sensor, Trawl Interface and Navigation Interface dialogue
boxes. These are in turn accessed from the Install menu.
It allows you to control the depth data output.
Parameters
Depth output - Check to enable the depth output.
Checksum - A checksum may optionally be appended to the
NMEA output telegrams (according to the NMEA standard).
Channel - NMEA depth telegrams are only output from one
channel at a time. Select channel from the list of installed
frequency channels.
The GPT uses its Ethernet address for unique identification, and
the PCT uses its ISA bus parameters; IO address, DMA channel
and IRQ number. The channel number identifies individual
channels within a multi-channel transceiver.
Telegram - The echo sounder can output three different types of
NMEA depth telegrams. However, only one telegram type at a
time can be generated. You can select the telegram type here.
• The $SDDBS telegram contains the depth below the surface.
• The $SDDBT telegram contains the depth below the
transducer.
• The $SDDPT telegram contains the depth below the
transducer and the distance between the transducer and the
waterline.
The EQ60 can also output the EA 500/EK500 compatible depth
telegrams; D1, D2 etc. Output for Atlas echo sounders are also
provided.
Related topics
→ Traw l Interface, page 116
→ Heace Sensor, page 88
→ Navigation Interface, page 95