



















Page 5-8 Robertson AP45 Autopilot
Installation
Simrad Robertson AS
Egersund - Norway
confirmation in the display if the AP45 has a software revision earlier than
V1R3.
Carry out the calibration procedure, then steer the boat on a known heading or
bearing. Slightly turn the heading sensor until the correct heading readout is
displayed. Tighten the screws.
Note!
If you sail the boat more than 15-20° north or south of the latitude of your last
calibration, the calibration procedure should be repeated. Calibration data is
stored in the RFC35NS and will only be deleted when a new calibration is
performed.
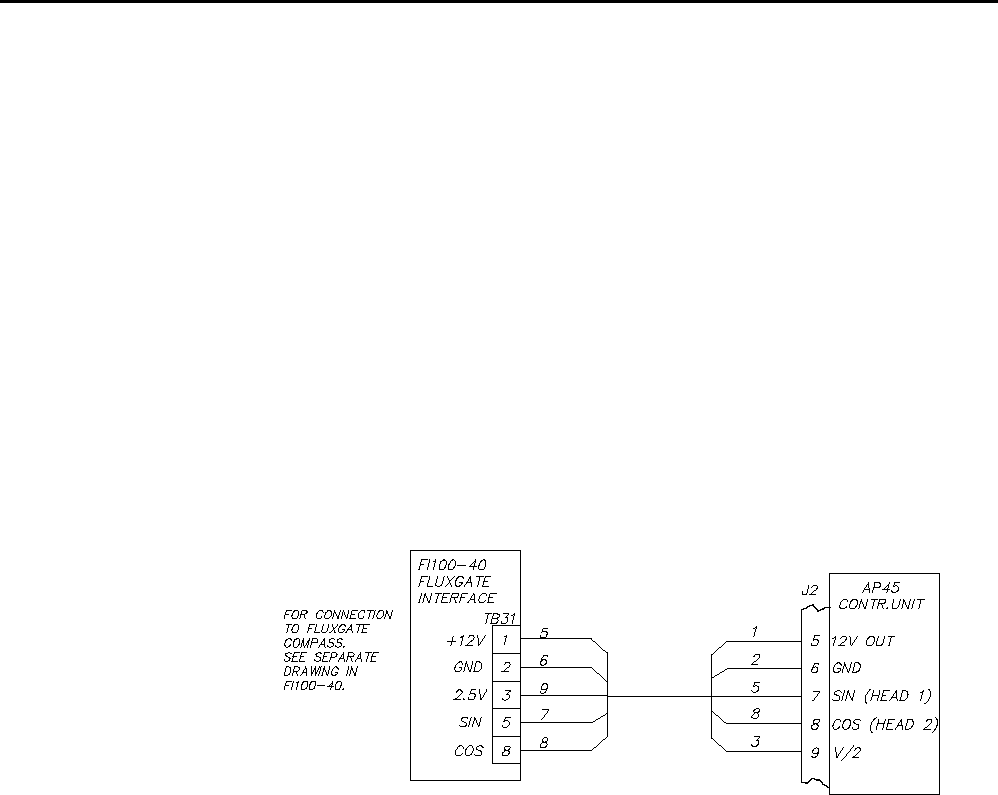
When connecting fluxgate compasses other than Robertson types, the FI100-40
Fluxgate Interface must be connected between the compass and the control unit.
The interface unit is bulkhead (or table) mounted with two screws.
The fluxgate compass is connected to a terminal board in the FI100-40 according
to the diagram enclosed with the unit. FI100-40 is connected to J2 of the control
unit according to Fig. 5-8.
Fig. 5-8
AP45/FI100-40 Fluxgate Interface - Wiring
Alignment
FI100-40 Fluxgate
Interface