



















220
Special operation and frequency control
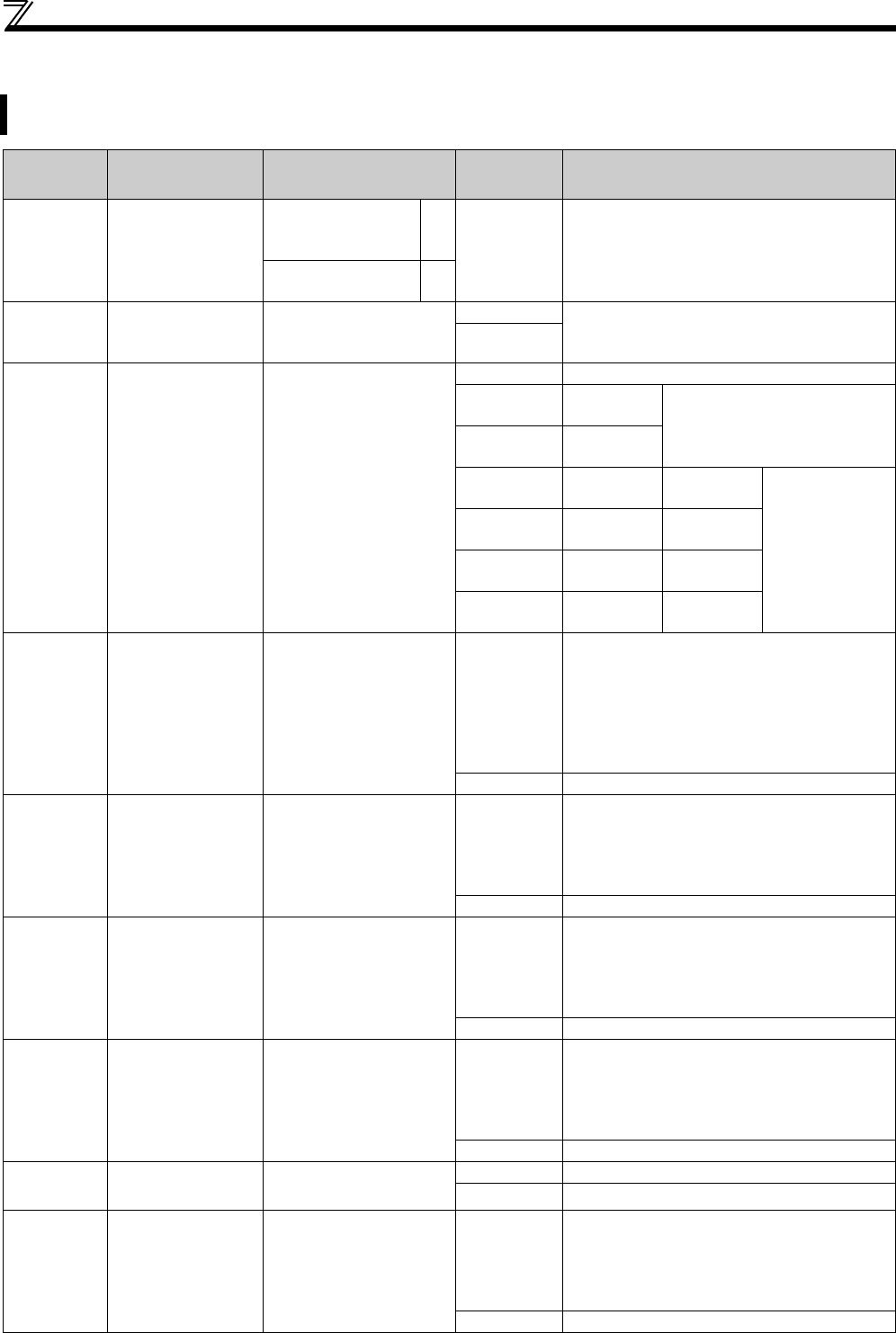
4.20.2 Dancer control (Pr. 44, Pr. 45, Pr. 128 to Pr. 134)
Performs PID control by feedbacking the position detection of the dancer roller, controlling the dancer roller is in the
specified position.
Parameter
Number
Name
Initial Value
Setting
Range
Description
44
Second
acceleration/
deceleration time
FR-D720-165 or less
FR-D740-080 or less
FR-D720S-008 to 100
5s
0 to 3600s
This parameter is the acceleration time of the main
speed during dancer control. It will not function as
second acceleration/deceleration time.
FR-D720-238 or more
FR-D740-120 or more
10s
45
Second
deceleration time
9999
0 to 3600s This parameter is the deceleration time of the main
speed during dancer control. It will not function as
second deceleration time.
9999
128
PID action
selection
0
0 PID action is not performed
20
PID reverse
action
Measured value (terminal 4)
Set value (terminal 2 or Pr. 133)
21
PID forward
action
40
PID reverse
action
Addition
method: fixed
For dancer control
set point (Pr. 133),
measured value
(terminal 4)
main speed (speed
command of the
operation mode)
41
PID forward
action
Addition
method: fixed
42
PID reverse
action
Addition
method: ratio
43
PID forward
action
Addition
method: ratio
129 ∗1
PID proportional
band
100%
0.1 to 1000%
If the proportional band is narrow (parameter
setting is small), the manipulated variable varies
greatly with a slight change of the measured value.
Hence, as the proportional band narrows, the
response sensitivity (gain) improves but the
stability deteriorates, e.g. hunting occurs. Gain Kp
= 1/proportional band
9999 No proportional control
130 ∗1 PID integral time
1s
0.1 to 3600s
When deviation step is input, time (Ti) is the time
required for integral (I) action to provide the same
manipulated variable as the proportional (P) action.
As the integral time decreases, the set point is
reached earlier but hunting occurs more easily.
9999 No integral control.
131 PID upper limit
9999
0 to 100%
Maximum value
If the feedback value exceeds the setting, the FUP
signal is output. The maximum input (20mA/5V/
10V) of the measured value (terminal 4) is
equivalent to 100%.
9999 No function
132 PID lower limit
9999
0 to 100%
Minimum value
If the process value falls below the setting range,
the FDN signal is output. The maximum input
(20mA/5V/10V) of the measured value (terminal 4)
is equivalent to 100%.
9999 No function
133 ∗1
PID action set
point
9999
0 to 100% Used to set the set point for PID control.
9999 Always 50%
134 ∗1
PID differential
time
9999
0.01 to 10s
For deviation ramp input, time (Td) required for
providing only the manipulated variable for the
proportional (P) action.
As the differential time increases, greater response
is made to a deviation change.
9999 No differential control.
The above parameters can be set when Pr.160 Extended function display selection ="0". (Refer to page 162)
∗1 Pr. 129, Pr. 130, Pr. 133 and Pr.134 can be set during operation. They can also be set independently of the operation mode.