



















A GPS Overview
MiLLennium GPSCard SW Version 4.503/4.52 Command Descriptions Manual Rev 2 71
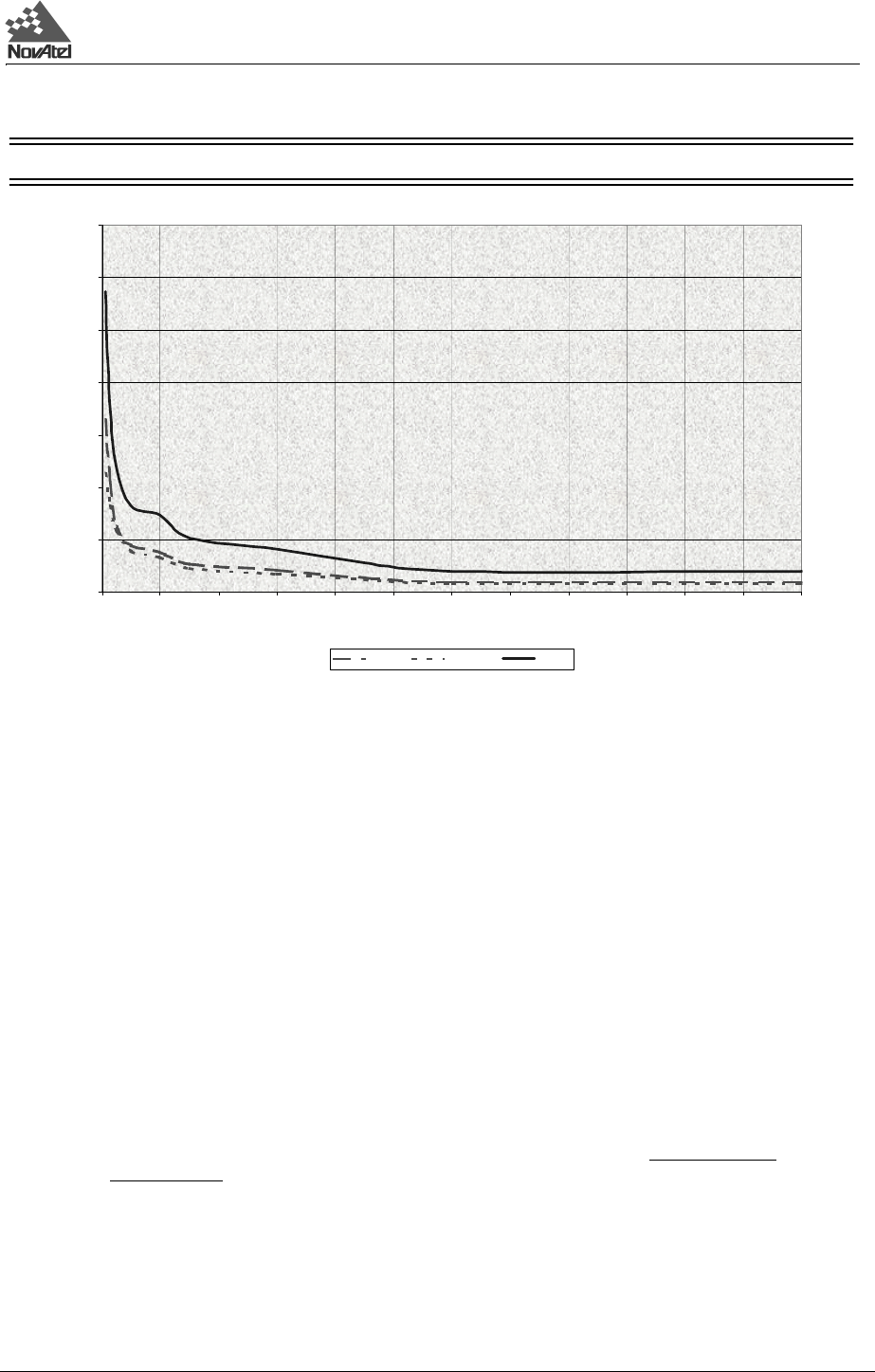
This function is useful for obtaining the WGS84 position of a point to a reasonable accuracy without having to
implement differential GPS. It is interesting to note that even a six hour occupation can improve single point GPS
accuracy from over fifty meters to better than five meters. This improved accuracy is primarily due to the
reductions of the multipath and selective availability errors in the GPS signal.
Again, it is necessary to keep in mind that the resulting standard deviations of the position averaging can vary quite
a bit, especially over relatively short averaging times. To illustrate, the position averaging function was run for a
period of one hour at three different times during the day. The resulting standard deviation in latitude varied from
4.7 to 7.0 meters. Similarly, the variation in longitude and height were 4.9 to 6.7 meters and 10.9 to 12.5 meters
respectively. This degree of variation is common for averaging periods of less than 12 hours due to changes in the
satellite constellation. The graph, however, should at least provide some indication of the accuracy one may expect
from single point position averaging.
Dual Station Differential Positioning
It is the objective of operating in differential mode to either eliminate or greatly reduce most of the errors
introduced by the above types of system biases. Pseudorange differential positioning is quite effective in largely
removing most of the biases caused by satellite clock error, ionospheric and tropospheric delays (for baselines less
than 50 km), ephemeris prediction errors, and SA. However, the biases caused by multipath reception and receiver
clock offset are uncorrelated between receivers and thus cannot be cancelled by "between receiver single
differencing" operation.
Differential operation requires that stations operate in pairs. Each pair consists of a reference station
(or control
station) and a remote station.
A differential network could also be established when there is more than one remote
station linked to a single reference station.
In order for the differential pair to be effective, differential positioning requires that both reference and remote
station receivers track and collect satellite data simultaneously from common satellites. When the two stations are
in relatively close proximity (< 50 km), the pseudorange bias errors are considered to be nearly the same and can
be effectively cancelled by the differential corrections. However, if the baseline becomes excessively long, the bias
errors begin to decorrelate, thus reducing the accuracy or effectiveness of the differential corrections.
Figure A-5 Single Point Averaging
NOTE: This graph represents typical results using position averaging.
0
5
10
15
20
25
30
35
0 4 812162024283236404448
Time (hours)
Standard Deviation (meters)
Latitude Longtitude Height