


















97
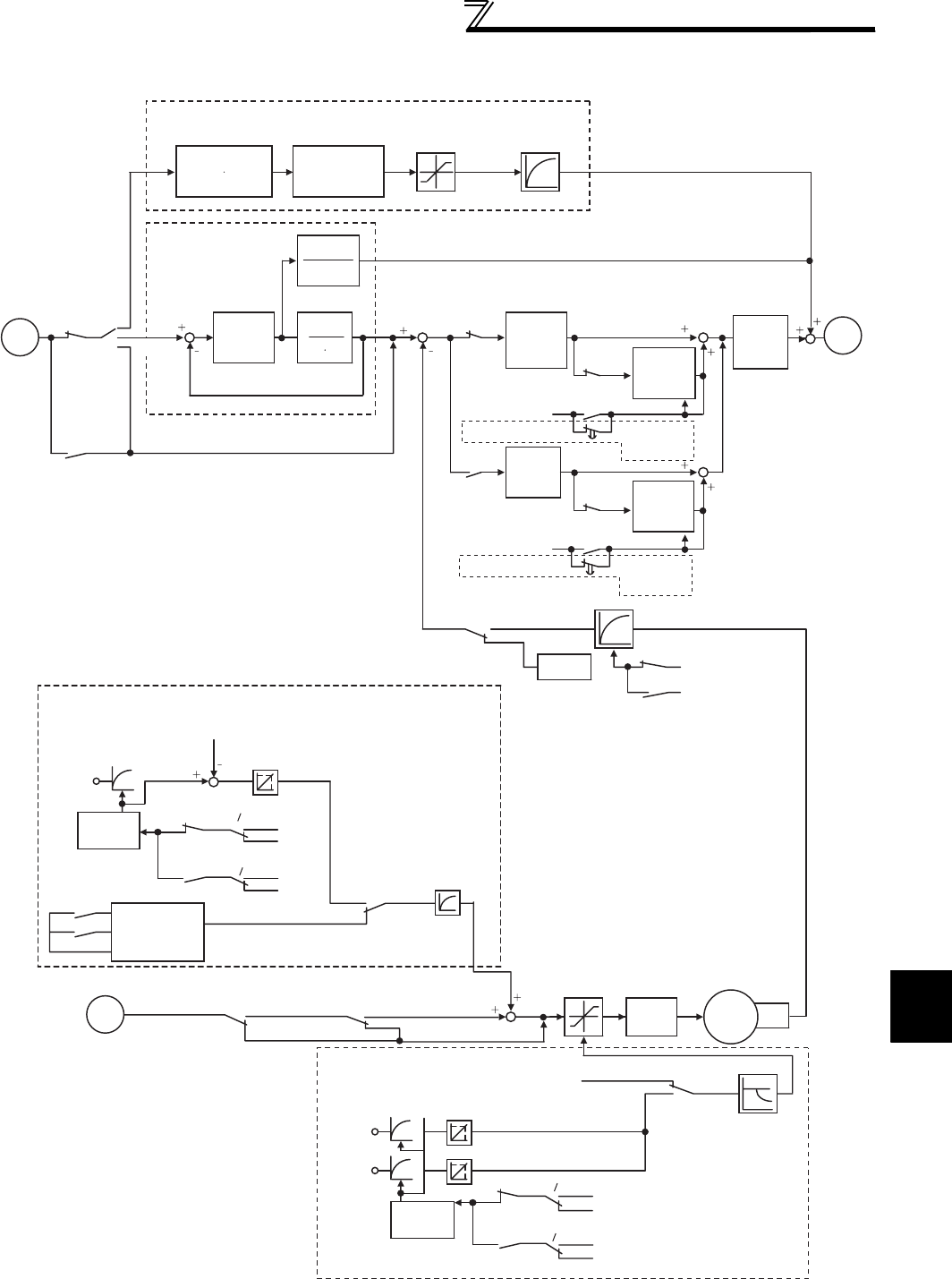
Speed control by Real sensorless
vector control, vector control
4
PARAMETERS
Load inertia ratio
J s
[Pr. 880]
Speed feed forward
gain
[Pr. 881]
Speed feed forward control
Model adaptive speed control
Model speed
control gain
[Pr. 828]
Speed feed forward
torque limit
[
Pr. 879
]
Speed feed
forward
filter [
Pr. 878
]
J [Pr. 880]
Model speed
calculation
1
J s
Speed
control
P gain 1
[Pr. 820]
Speed control
integral
time 1
[
Pr. 821
]
Speed control
integral
time 2
[
Pr. 831
]
Integration cleared to 0
Integration cleared to 0
Real sensorless
vector control
[Pr. 800 = 10]
Vector control
[Pr. 800 = 0]
Speed
estimation
RT RT
RT
RT
[Pr. 877 = 1]
[Pr. 877 = 0]
0
0
X44
X44
X44
X44
Speed detection filter
RT
RT
[Pr. 823]
[Pr. 833]
Torque bias selection
[Pr. 840 = 0 to 2]
Torque bias
Torque bias balance
compensation
[Pr. 846]
Terminal 1 bias [C16, C17(Pr. 919)]
Terminal 1 gain [C18, C19(Pr. 920)]
Fall-time torque bias terminal 1 bias [Pr. 847]
Fall-time torque bias terminal 1 gain [Pr. 848]
Terminal 1
[Pr. 868 = 6]
Torque
setting
filter
Torque bias
[Pr. 841 to 843]
X42
X43
Torque bias
selection
[Pr. 840 = 1, 2]
Torque bias
filter
[Pr. 844]
[Pr. 840 = 0]
Torque limit
Terminal 1
[Pr. 868 = 4]
Terminal 4
[Pr. 858 = 4]
Torque
setting
filter
Terminal 1 bias [C16, C17(Pr. 919)]
Terminal 1 gain [C18, C19(Pr. 920)]
Terminal 4 bias [C38, C39(Pr. 932)]
Terminal 4 gain [C40, C41(Pr. 933)]
[Pr. 22, 812 to 817]
[Pr. 810 = 0]
[Pr. 810 = 1]
Torque limit
input method
selection
Constant power
range torque
characteristic
selection
[Pr. 803]
Torque
control
Motor
Torque limit
Encoder
[Pr. 840 = 9999]
A
B
B
[Pr. 877 = 2]
Torque
coefficient
RT
RT
[Pr. 826]
[Pr. 826]
[Pr. 836]
[Pr. 74]
[Pr. 74]
[Pr. 826 = 9999]
[Pr. 836 = 9999]
[Pr. 836 = 9999]
[Pr. 826 = 9999]
RT
RT
Notch
filter
[Pr. 862]
[Pr. 863]
Torque bias
operation
time
[
Pr. 845
]
When torque bias is selected
Torque bias
operation
time
[
Pr. 845
]
Vector control
[Pr. 800 = 0]
Real sensorless
vector control
[Pr. 800 = 10]
Speed
control
P gain 2
[Pr. 830]
When torque bias is selected
[Pr. 826 = 9999]
[Pr. 826 = 9999]
[Pr. 836 = 9999]
[Pr. 836 = 9999]
[Pr. 74]
[Pr. 74]
[Pr. 836]