



















477
458
Second motor constant (R1)
3A BA 4
×
× × ×
×
459 Second motor constant (R2)
3B BB 4
× ××××
460 Second motor constant (L1)
3C BC 4
× × × × ×
461
Second motor constant (L2)
3D BD 4
×
×××
×
462
Second motor constant (X)
3E BE 4
×
× × ×
×
463
Second motor auto tuning
setting/status
3F BF 4
× ××××
464
Digital position control
sudden stop deceleration
time
40 C0 4
× × × ×
× ×
465
First position feed amount
lower 4 digits
41 C1 4
××××
××
466
First position feed amount
upper 4 digits
42 C2 4
× × × ×
× ×
467
Second position feed
amount lower 4 digits
43 C3 4
××××
××
468
Second position feed
amount upper 4 digits
44 C4 4
× × × ×
× ×
469
Third position feed amount
lower 4 digits
45 C5 4
××××
××
470
Third position feed amount
upper 4 digits
46 C6 4
× × × × × ×
471
Fourth position feed amount
lower 4 digits
47 C7 4
××××
××
472
Fourth position feed amount
upper 4 digits
48 C8 4
× × × × × ×
473
Fifth position feed amount
lower 4 digits
49 C9 4
××××
××
474
Fifth position feed amount
upper 4 digits
4A CA 4
× × × ×
× ×
475
Sixth position feed amount
lower 4 digits
4B CB 4
×××× ××
476
Sixth position feed amount
upper 4 digits
4C CC 4
× × × ×
× ×
477
Seventh position feed
amount lower 4 digits
4D CD 4
××××
××
478
Seventh position feed
amount upper 4 digits
4E CE 4
× × × ×
× ×
479
Eighth position feed amount
lower 4 digits
4F CF 4
××××
××
480
Eighth position feed amount
upper 4 digits
50 D0 4
× × × × × ×
481
Ninth position feed amount
lower 4 digits
51 D1 4
××××
××
482
Ninth position feed amount
upper 4 digits
52 D2 4
× × × ×
× ×
483
Tenth position feed amount
lower 4 digits
53 D3 4
×××× ××
484
Tenth position feed amount
upper 4 digits
54 D4 4
× × × ×
× ×
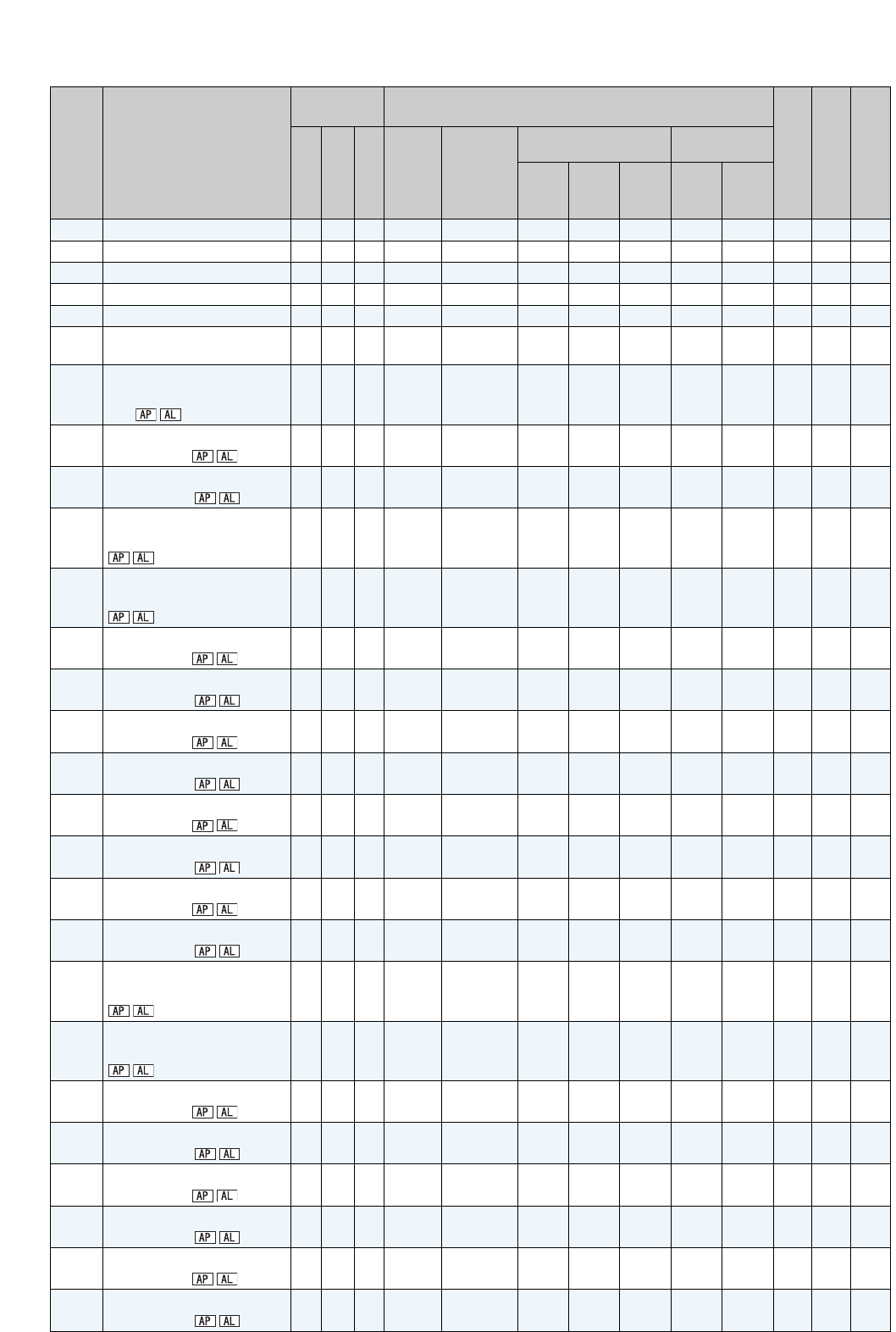
Parameter
Name
Instruction
Code
* 1
Control Mode-based Correspondence Table *2
Parameter Copy
*3
Parameter Clear
*3
All Parameter Clear
*3
Read
Write
Extended
V/F
control
Advanced
magnetic
flux
vector
control
Vector control
Real sensorless
vector control
Speed
control
Torque
control
Position
control
Speed
control
Torque
control