



















134
Position control by vector control
4.6.2 Simple position feed function by contact input (Pr. 419, Pr. 464 to Pr. 494)
REMARKS
⋅ For the servo ON signal (LX), set "23" in Pr. 178 to Pr. 189 (input terminal function selection) to assign the function.
⋅ For the in-position signal (Y36), set "36" in Pr. 190 to Pr. 196 (output terminal function selection) to assign the function.
CAUTION
Changing the terminal function using any of Pr. 178 to Pr. 189, 190 to Pr. 196 may affect the other functions. Set parameters after
confirming the function of each terminal.
♦Parameters referred to♦
Pr. 178 to Pr. 189 (input terminal function selection) Refer to page 231
Pr. 190 to Pr. 196 (output terminal function selection) Refer to page 239
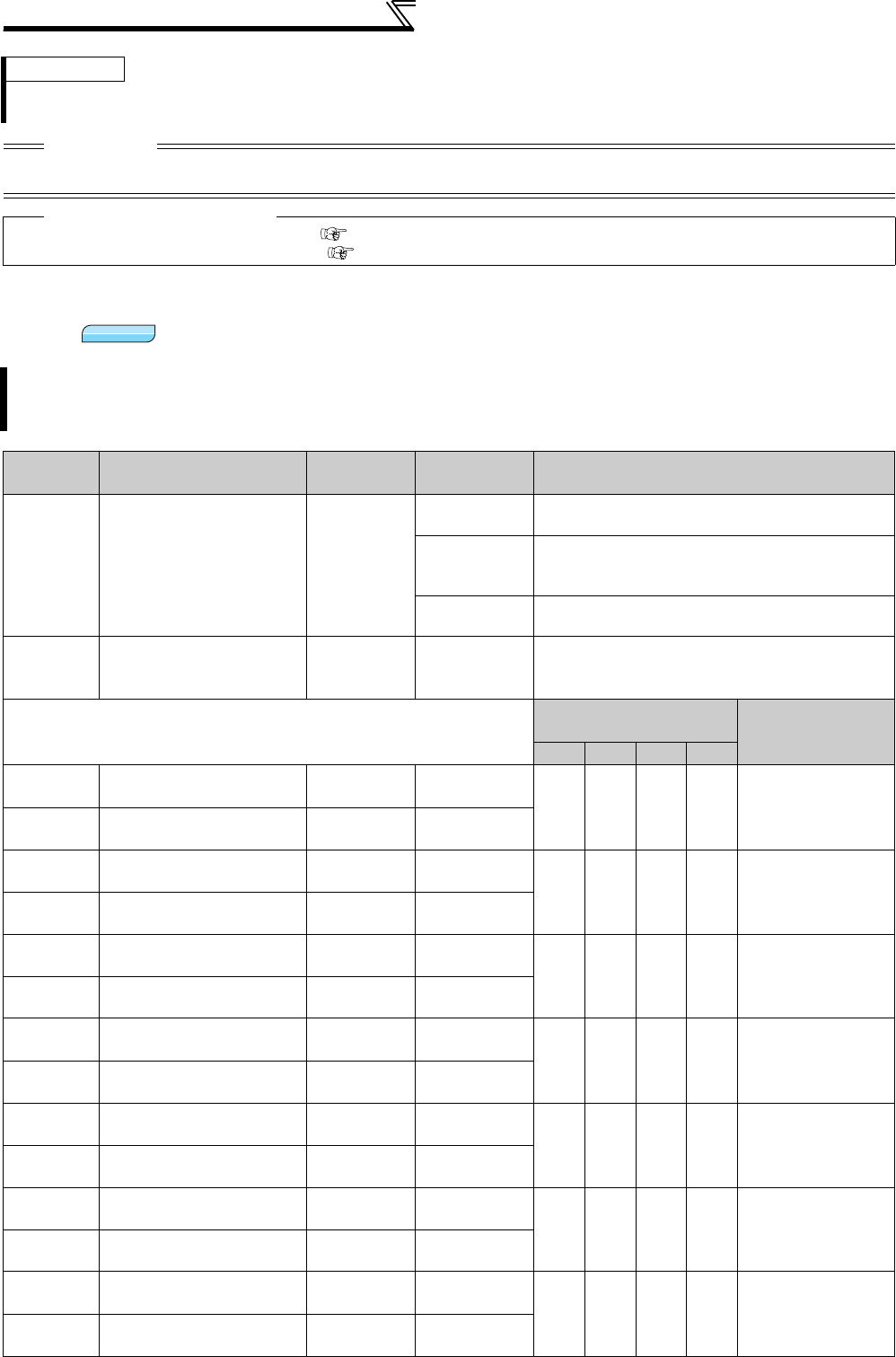
Inputting the number of pulses (positions) in the parameters and setting multi-speed and forward (reverse)
commands enable position control. The motor does not return to the home position with this simple position feed
function.
Parameter
Number
Name Initial Value
Setting
Range
Description
419
Position command source
selection
0
0
Simple position control function by contact input.
(position command by parameter settings)
1
Pulse train position command from the positioning
module of the programmable controller system
(when FR-A7AL is installed)
2
Simple pulse train position command by inverter
pulse train input
464
Digital position control
sudden stop deceleration
time
0s 0 to 360.0s
Set the time until the inverter stops when the
forward rotation (reverse rotation) command is
turned OFF with the position feed forward function.
Selection Method
(OFF:
×, ON: )
Position feed
frequency
REX RH RM RL
465
First position feed amount
lower 4 digits
0 0 to 9999
× ××High speed (Pr. 4)
466
First position feed amount
upper 4 digits
0 0 to 9999
467
Second position feed
amount lower 4 digits
0 0 to 9999
×× × Middle speed (Pr. 5)
468
Second position feed
amount upper 4 digits
0 0 to 9999
469
Third position feed
amount lower 4 digits
0 0 to 9999
××× Low speed (Pr. 6)
470
Third position feed
amount upper 4 digits
0 0 to 9999
471
Fourth position feed
amount lower 4 digits
0 0 to 9999
××4 speed (Pr. 24)
472
Fourth position feed
amount upper 4 digits
0 0 to 9999
473
Fifth position feed amount
lower 4 digits
0 0 to 9999
× × 5 speed (Pr. 25)
474
Fifth position feed amount
upper 4 digits
0 0 to 9999
475
Sixth position feed
amount lower 4 digits
0 0 to 9999
× × 6 speed (Pr. 26)
476
Sixth position feed
amount upper 4 digits
0 0 to 9999
477
Seventh position feed
amount lower 4 digits
0 0 to 9999
× 7 speed (Pr. 27)
478
Seventh position feed
amount upper 4 digits
0 0 to 9999
Vector
Vector
Vector