
















1. FUNCTIONS AND CONFIGURATION
1 - 11
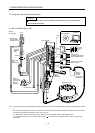
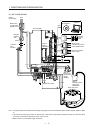
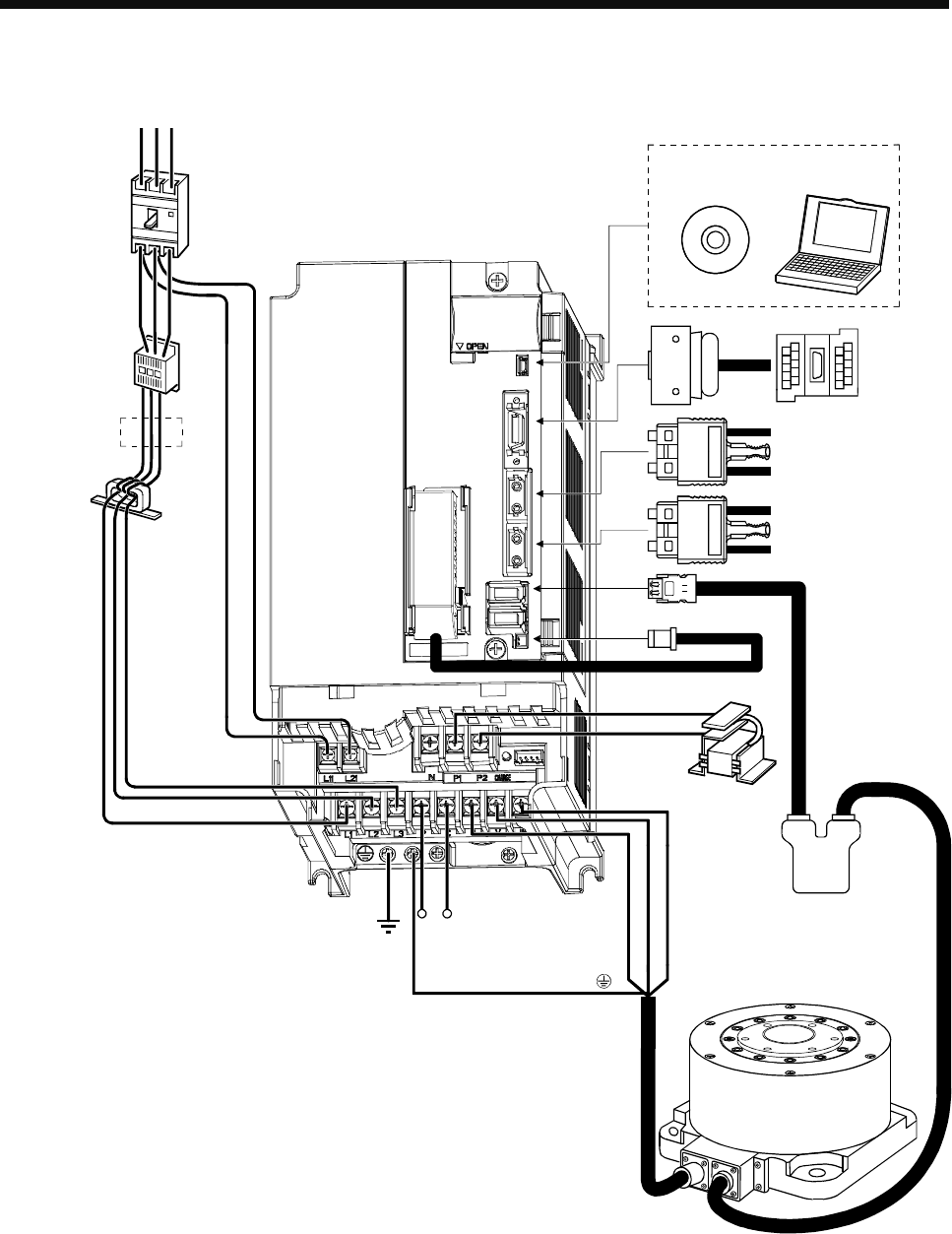
(3) MR-J3-500B-RJ080W
Servo amplifier
MR Configurator
Personal
computer
Line noise
filter
(FR-BLF)
Magnetic
contactor
(MC)
Molded-case
circuit breaker
(MCCB) or fuse
Regenerative option
Power factor
improving DC
reactor
(FR-BEL)
Servo system
controller or Front axis
servo amplifier CN1B
Rear servo amplifier
CN1A or Cap
Junction
terminal
block
(Note 3)
Power supply
(Note 2)
(Note 2)
(Note 1)
Battery
MR-J3BAT
(Note 1)
Absolute position
storage unit
MR-BTAS01
Direct drive motor
R S T
L21
P1
P
2
CN3
CN2
CN1A
CN1B
CN4
CN5
L11
UVW
CP
L1
L2
L
3
Note 1. The battery (option) and absolute position storage unit (option) are used for the absolute position detection system. (Refer to chapter
9.)
2. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used. When
not using the power factor improving DC reactor, short P
1
and P
2
.
3. Refer to section 1.2 for the power supply specification.