



















4. OPERATION AND FUNCTIONS
4 - 9
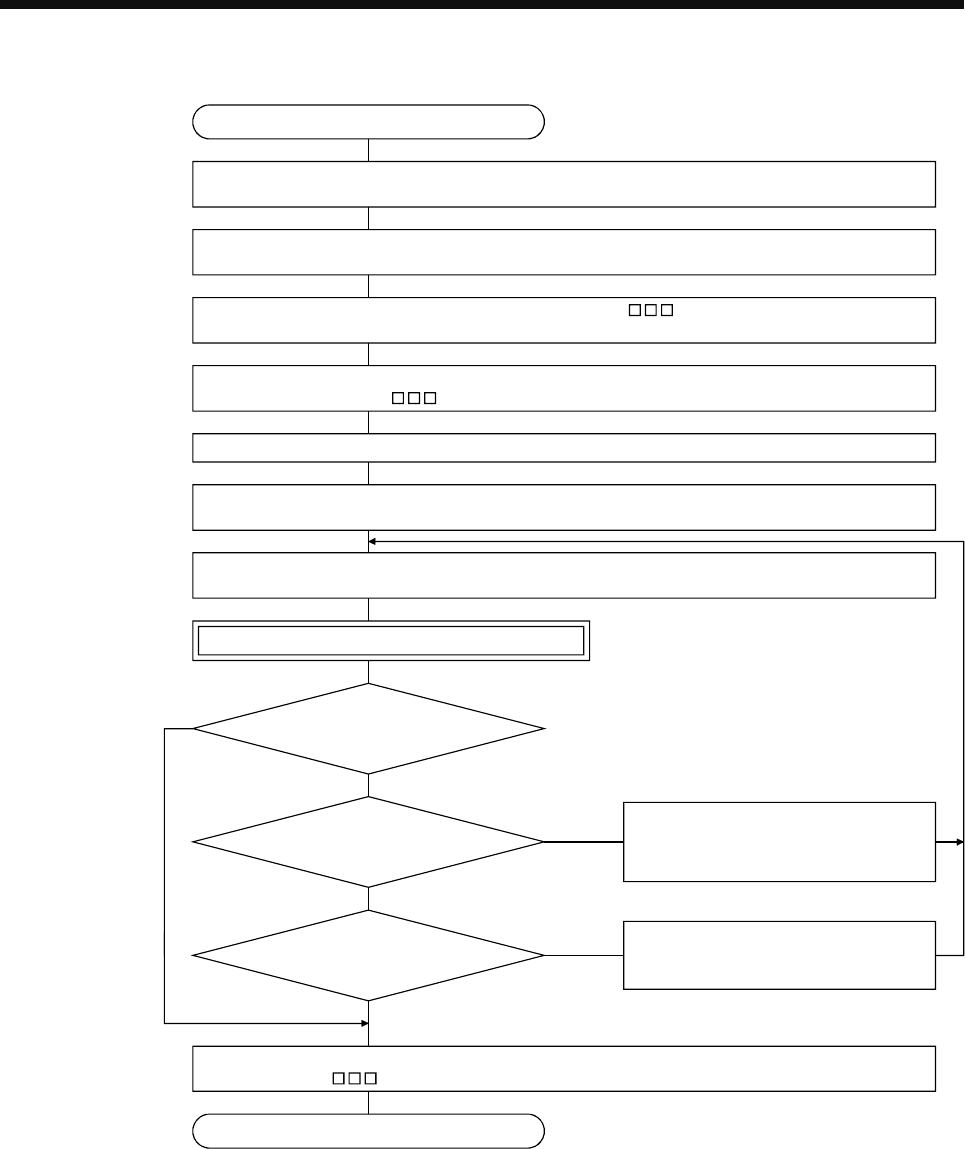
(2) Magnetic pole detection using minute position detection method
Change to "Magnetic pole detection invalid" by setting the parameter No.PS01 (Special function
selection 1) to " 0". (Note 1)
Change to "Magnetic pole detection always valid" by setting the parameter No.PS01 (Special
function selection 1) to " 1". (Note 1)
Set parameter No.PS08 (Special function selection 3) to " 4", and the magnetic pole detection
method to "minute position detection method".
Does the travel distance
during the magnetic pole detection
has a problem? (Note 3)
Turn the power of servo amplifier off once and then turn it on again. 5)
Set the load inertia moment ratio of the direct drive motor with parameter No.PS17 (Minute position
detection method function selection). (Note 2)
7)
Execute the "forward rotation" or "reverse rotation" with the "positioning operatation" of the MR
Configrator test operation mode. Set the travel distance to "0" at this time.
3)
The magnetic pole detection is carried out.
Is the response of the
minute position detection method,
which is set by parameter No.PS17 (Minute position
detection method function selection),
finalized?
Do abnormal sounds and
vibration occur during the
magnetic pole detection?
Lower the response of the minute position
detection method by two in parameter No.PS17
(Minute position detection method function
selection), and use the value as the finalized
value.
Raise the response of the minute position
detection method by one in parameter No.PS17
(Minute position detection method function
selection).
Problem
exists
YES
Problem does not exist
NO
YES
NO
Magnetic pole detection
End
8)
1) After confirming that the stroke limits (FLS and RLS) and the forced stop (EM1) are on, turn the
power of servo amplifier off once and then turn it on again.
After switching the test operation select switch (SW2-1) of the servo amplifier to "Up", turn the power
of servo amplifier off once and then turn it on again.
2)
4)
6)
Note 1. Parameter No.PS01 setting is unnecessary for an incremental system.
2. When the load inertia moment ratio of the direct drive motor is unknown, detect magnetic poles with the
position detection method, perform auto tuning, and set an estimated value.
3. When detecting magnetic poles with the minute position detection method, the maximum travel distance of
5 degrees or less during the magnetic pole detection is acceptable. To shorten the travel distance, increase
the response of the minute position detection method in parameter No.PS17 (Minute position detection
method function selection).