


















8. CHARACTERISTICS
8 - 4
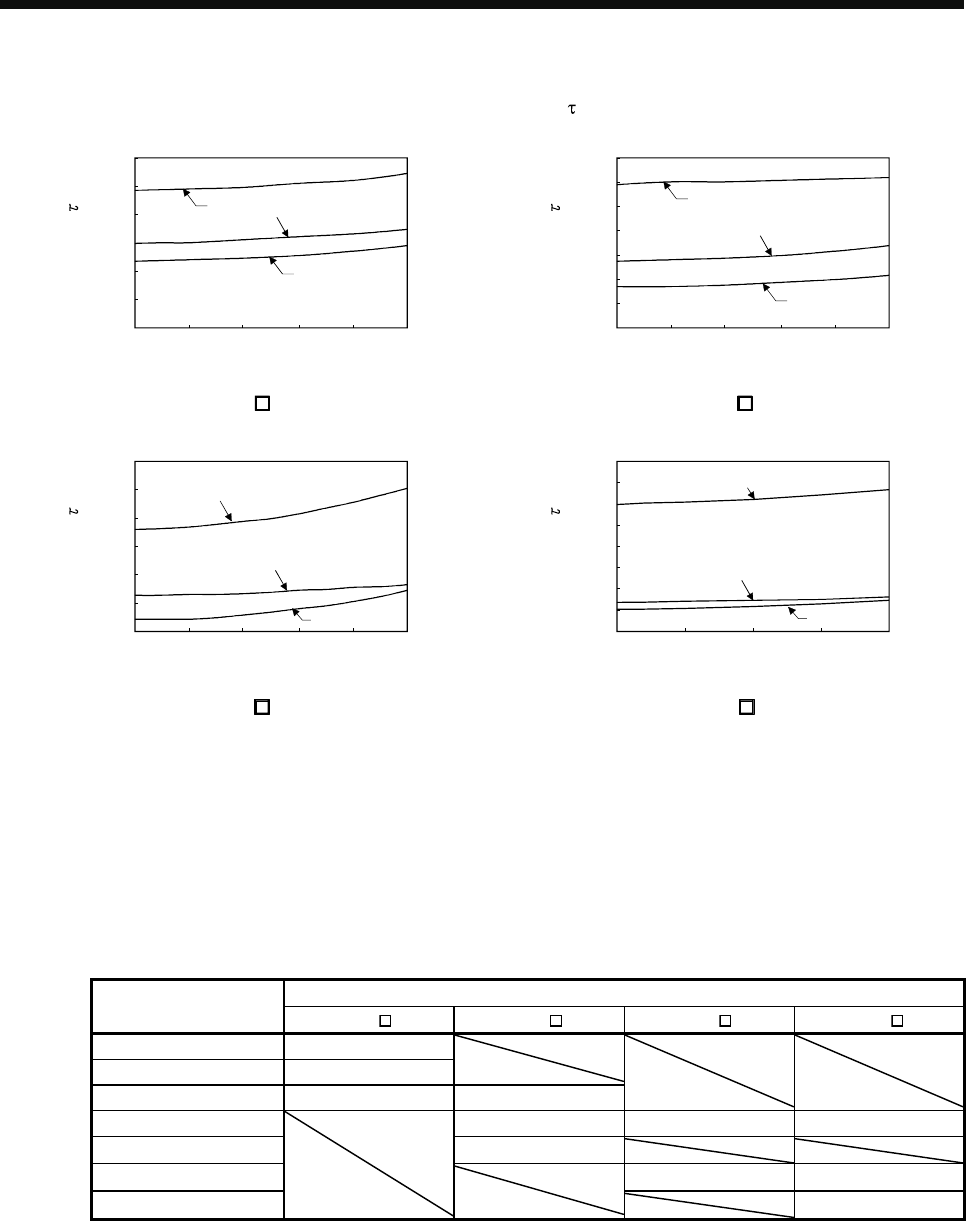
(2) Dynamic brake time constant
The following shows necessary dynamic brake time constant
for the equation (8.1).
Speed [r/min]
Time constant [ms]
0
0 100 200
5
15
20
25
30
300 400 500
006
004
10
002
Speed [r/min]
Time constant [ms]
0
0 100 200
70
300 400 500
012
006
018
10
20
30
40
50
60
TM-RFM
C20 TM-RFM E20
0
0
10
30
40
50
60
072
048
20
012
100 200 300 400 500
Speed [r/min]
Time constant [ms]
0
0
60
120
040
240
50 100 150 200
70
80
50
40
30
20
10
Speed [r/min]
Time constant [ms]
TM-RFM
G20 TM-RFM J10
8.2.2 The dynamic brake at the load inertia moment ratio
Use the dynamic brake under the load inertia moment ratio indicated in the following table. If the load inertia
moment is higher than this value, the dynamic brake may burn. If there is a possibility that the load inertia
moment may exceed the value, contact your local sales office.
The values of the load inertia moment ratio in the table are the values at the maximum rotation speed of the
direct drive motor.
The value in the parenthesis shows the value at the rated speed of the direct drive motor.
Direct drive motor
Servo amplifier
TM-RFM
C20 TM-RFM E20 TM-RFM G20 TM-RFM J10
MR-J3-20B-RJ080W 100(300)
MR-J3-40B-RJ080W 100(300)
MR-J3-60B-RJ080W 100(300) 100(300)
MR-J3-70B-RJ080W 100(300) 50(300) 50(200)
MR-J3-100B-RJ080W 100(300)
MR-J3-350B-RJ080W 50(300) 50(200)
MR-J3-500B-RJ080W
50(200)