

















4. OPERATION AND FUNCTIONS
4 - 17
(2) Speed deviation error detection
Set the parameter No.PS04 to "
2" to make the speed deviation error detection enabled.
Speed deviation
error detection valid
2
Parameter No.PS04
If there is a deviation larger than the setting value (1 to 2000r/min) of the parameter No.PS06 (Servo control
speed deviation error detection level) after comparing the model feedback speed 3) and the feedback speed
4) in Figure 4.1, the alarm (Servo control error 42) occurs, and the direct drive motor stops. The initial value
of parameter No.PS06 is 100r/min. Change the setting value as necessary.
(3) Torque deviation error detection
Set the parameter No.PS04 to "
4" to make the torque deviation error detection enabled.
4
Parameter No.PS04
Torque deviation
error detection valid
If there is a deviation larger than the setting value (1 to 1,000
) of the parameter No.PS07 (Servo control
torque deviation error detection level) after comparing the command torque 5) and the feedback torque 6) in
Figure 4.1, the alarm (Servo control error 42) occurs, and the direct drive motor stops. The initial value of
parameter No.PS05 is 100
. Change the setting value as necessary.
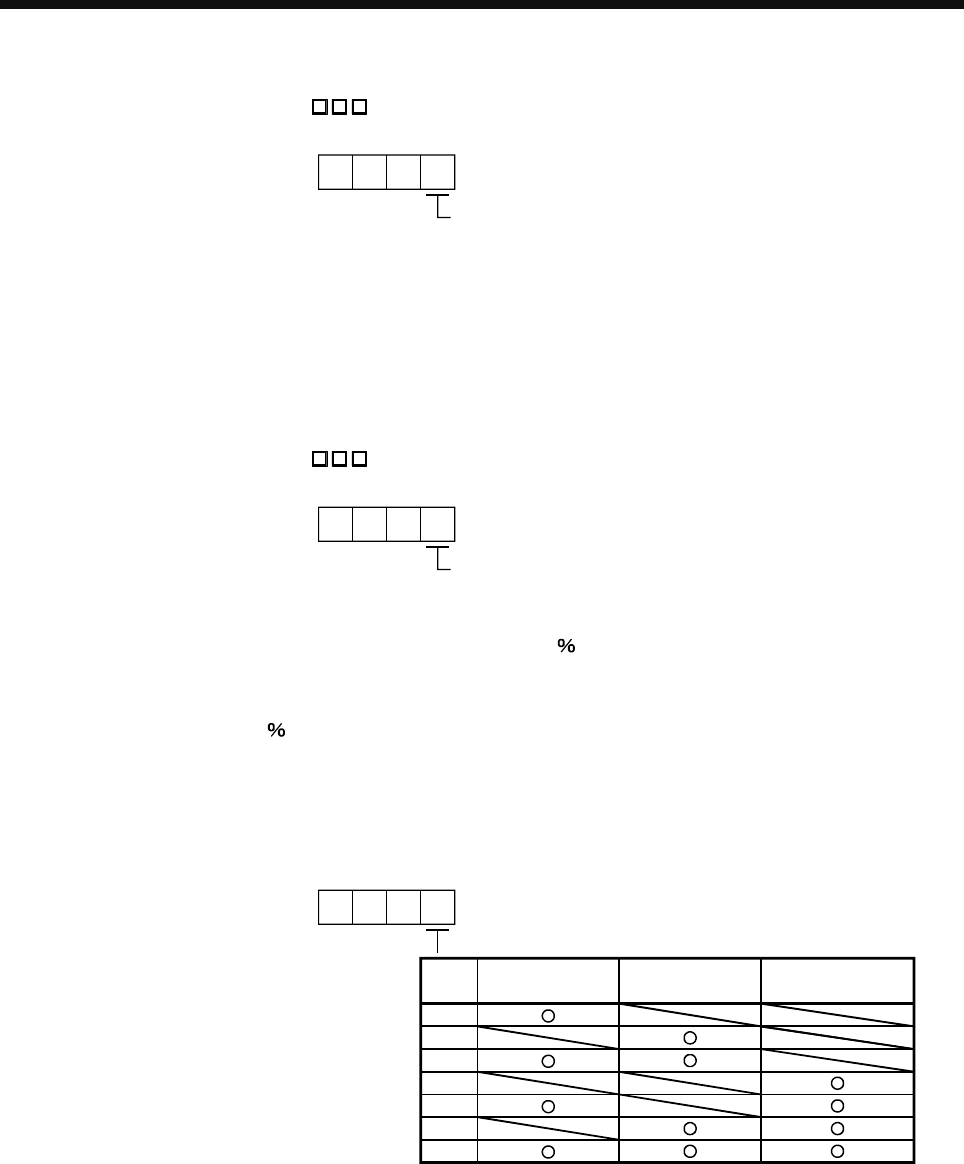
(4) Detecting multiple deviation errors
Setting the parameter No.PS04 as shown below allows the direct drive motor to detect multiple deviation
errors. For the error detection methods, refer to (1) to (3) in this section.
Parameter No.PS04
Position deviation
error detection
Setting
value
Speed deviation
error detection
Torque deviation
error detection
1
5
6
7
3
2
4