

















5. PARAMETERS
5 - 9
5.6.2 List of details
Classification No. Symbol Name and function
Initial
value
Unit Setting range
Special setting parameters
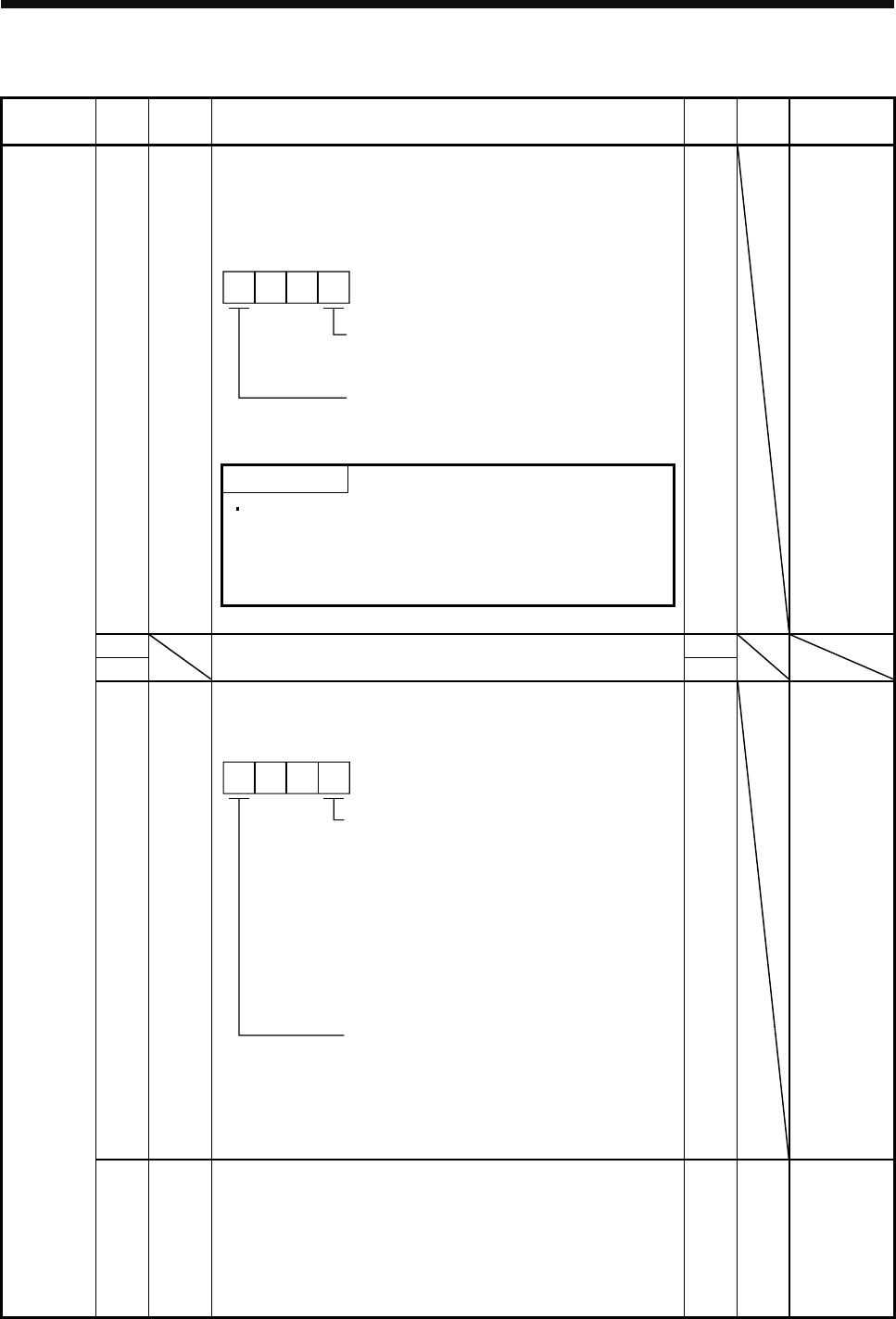
PS01 *LIT1 Special function selection 1
The magnetic pole detection setting, the valid/invalid setting of the direct
drive motor thermistor can be selected. (Refer to section 4.2)
Direct drive motor magnetic pole detection setting is unnecessary for an
incremental system.
Direct drive motor magnetic pole detection setting
0: Magnetic pole detection invalid
1: Magnetic pole always valid
00
Direct drive motor thermistor valid/invalid setting
0: Thermistor error detection valid
1: Thermistor error detection invalid
0001h Refer to the
name and
function
column
POINT
To protect the direct drive motor from overheating,
usually fabricate a cable that includes a thermistor
wire. Set the thermistor error detection to be valid
with this parameter.
PS02 0000h
PS03
For manufacturer setting
Do not change this value by any means.
0000h
PS04 *LIT2 Special function selection 2
Servo control error detection function and servo control error reset can
be selected.
Servo control error detection function selection
(Refer to section 4.4)
0: Invalid
1: Position deviation error detection valid
2: Speed deviation error detection valid
3: Position/speed detection deviation error
detection valid
4: Torque deviation error detection valid
5: Position/torque deviation error detection valid
6: Speed/torque deviation error detection valid
7: Position/speed/torque deviation error detection
valid
Servo control error detection reset selection
Set the controller reset condition of the servo
control error detection (42).
0: Reset impossible (Reset by switching off is
possible.)
1: Reset possible
00
0003h Refer to the
name and
function
column
PS05 LBI Servo control position deviation error detection level
Used to set the position deviation error detection level of the servo
control error detection. When the difference between the model
feedback position and the feedback position is bigger than this setting
value, the servo control error is detected (42). When the initial value is
(9), the mechanical radian is approximately 30 deg. (Refer to section
4.4)
9 0.01
rev
1 to 1000