


















4. OPERATION AND FUNCTIONS
4 - 14
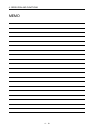
(b) Sequence program example when QD75MH
is used
The following shows the example of writing the axis No.1 servo parameter to the flash ROM.
After changing the servo parameter, turn on the power of QD75MH
again or reset the CPU, then
send the setting value to the servo amplifier. Refer to (3) in this section for the special setting parameter
(No. PS
) address of servo parameter.
K30273 K100
K30274 K100
K30275 H0010
K30279 K500
K30284 H0000
K30285 K0
K1900 K1
K30198 H0020
K30268 H0001
K30271 H0003
K30272 K9
K30101 H0060
K30164 K3
K30166 H0000
TOP H0 K1
TOP H0 K1
TOP H0 K1
TOP H0 K1
TOP H0 K1
TOP H0 K1
TOP H0 K1
(Note 1)
Write condition
Setting of the servo parameter No.PS06
Setting of the servo parameter No.PS07
Setting of the servo parameter No.PS08 (Note 2)
Setting of the servo parameter No.PS12
Setting of the servo parameter No.PS17
Setting of the servo parameter No.PS18
Write to flash ROM
TOP H0 K1
TOP H0 K1
TOP H0 K1
TOP H0 K1
Setting of the servo parameter No.PD03
Setting of the servo parameter No.PS01
Setting of the servo parameter No.PS04
Setting of the servo parameter No.PS05
TOP H0 K1
TOP H0 K1
TOP H0 K1
Setting of the servo parameter No.PA01
Setting of the servo parameter No.PC01
Setting of the servo parameter No.PC03
TOP H0 K30199 H0021 K1 Setting of the servo parameter No.PD04
TOP H0 K30276 K30 K1
TOP H0 K30277 H0005 K1
TOP H0 K30278 H0064 K1
Setting of the servo parameter No.PS09
Setting of the servo parameter No.PS10
Setting of the servo parameter No.PS11
Note 1. Configure a sequence program where the servo parameters are written to the flash ROM only when a servo parameter is
changed.
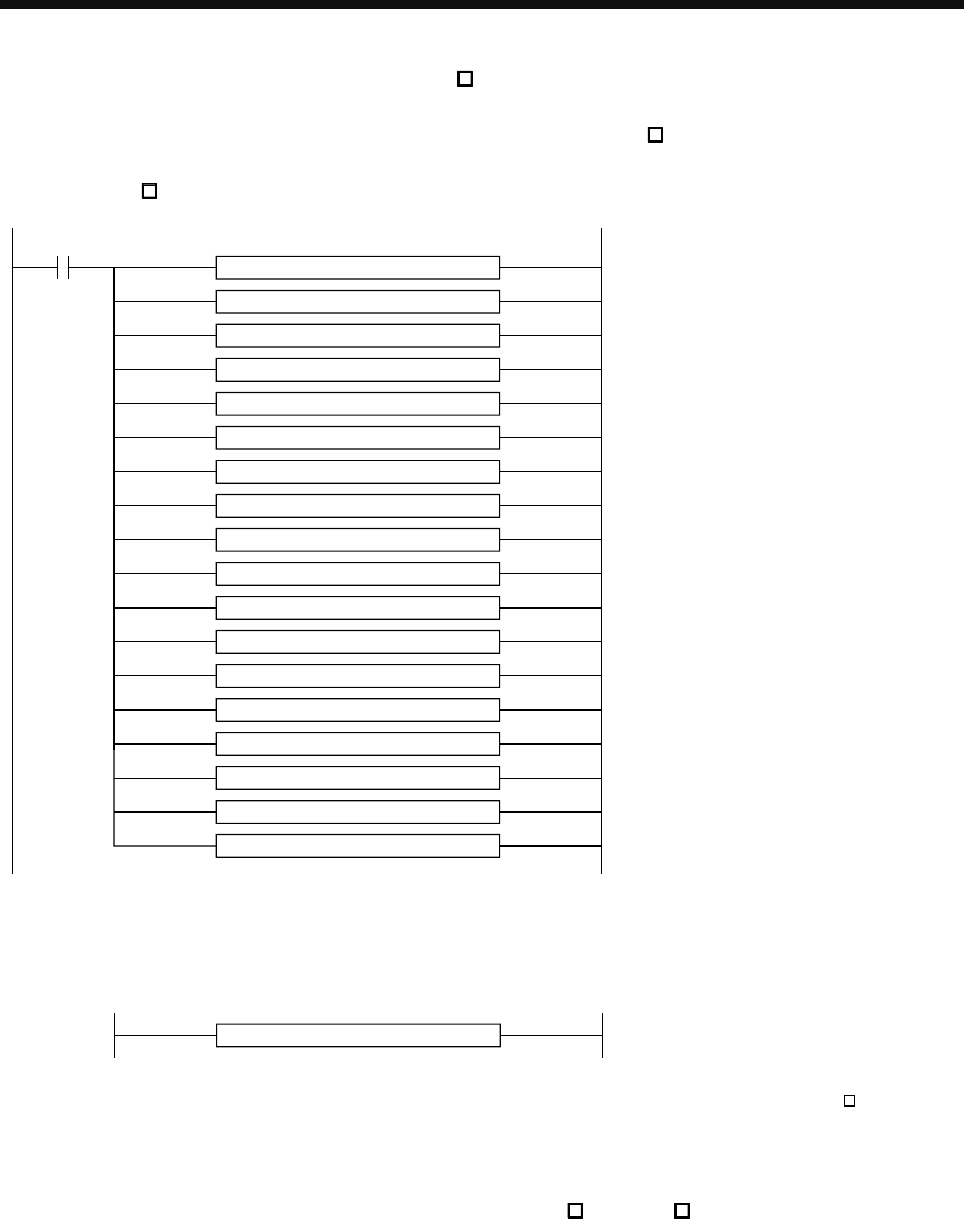
2. Change the sequence program of the servo parameter No.PS08 to the following sequence program for the magnetic pole
detection without the stroke limit (FLS and RLS).
TOP H0 K30275 K0110 K1
Setting of the servo parameter No.PS08
However, do not change to this sequence program if using the stroke limit (FLS and RLS) at the QD75MH side.
(c) Initialization of the servo parameter at the startup of direct drive servo
1) Before turning the power of servo amplifier on, write the servo parameter initial value, which is unique
to the direct drive servo, to the flash ROM of QD74MH
/QD75MH referring to the sequence
program example shown in (2) in this section.
2) After completion of writing to the flash ROM, turn the power of servo amplifier on.