


















3. SIGNALS AND WIRING
3 - 11
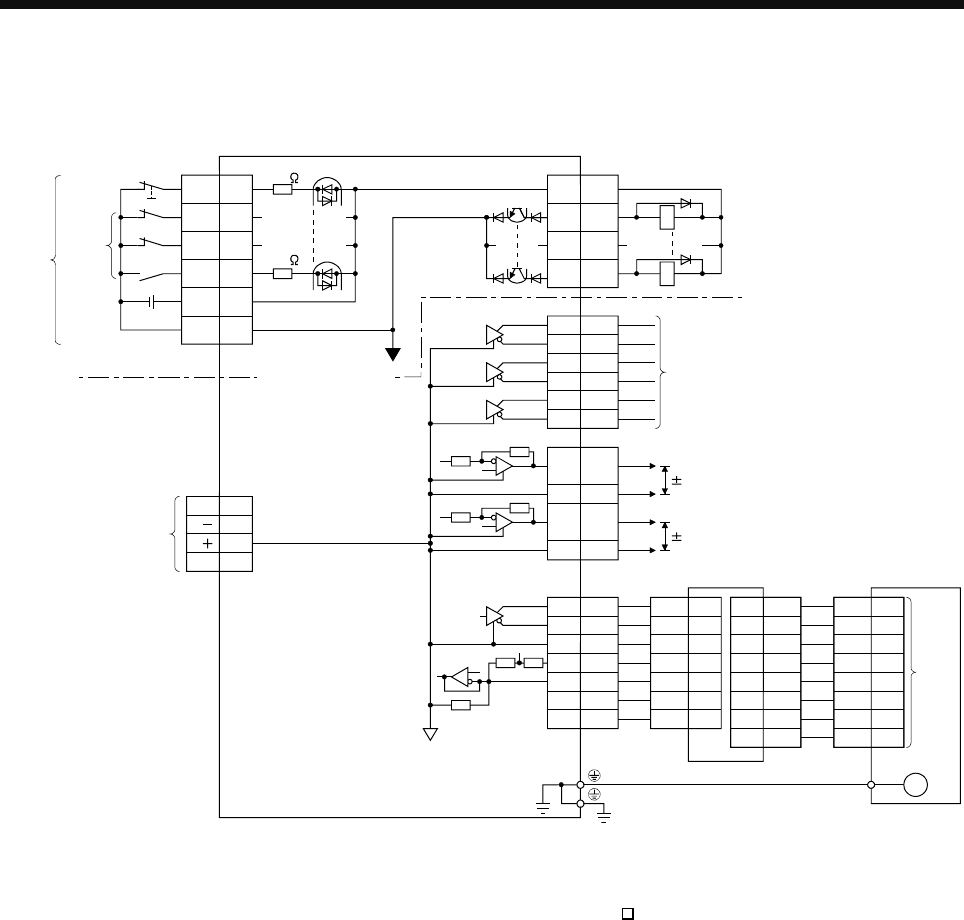
3.5.2 Absolute position detection system
3
EM1
CN3
20
DI1 2
DI2 12
DI3 19
DICOM
5
3
CN3
10
13
9
15
DICOM
INP
ALM
CN3
6
16
7
17
8
18
LA
LAR
LB
LBR
LZ
LZR
CN3
MO1
MO2
LG
4
14
11
Differential line
driver output
(35mA or less)
<Isolated>
Analog monitor
Servo amplifier
2
4
MR
MRR
LG
LG1
MBR
DOCOM
24VDC
Forced stop
CN2
RA
RA
5THM1
6THM2
(Note 5) (Note 5)
1P5
9BAT
MR
MRR
LG
THM1
7
10
8
6
11THM2
MR
MRR
LG
THM1
THM2
7
10
8
6
11
Absolute position
strage unit (Note 4)
2
P5 9
BAT
2
9
1
BAT
P5
VB
E
M
MR
MRR
LG
THM1
THM2
7
10
8
6
11
2
9
1
BAT
P5
VB
Direct drive
motor
(Note 3)
Encoder
P5
Approx.
5.6k
10VDC
(Note 2)
(Note 1)
Approx.
5.6k
(Note 2)
10VDC
USB
D
GND
VBUS
D
1
2
3
5
CN5
Note 1. Signal can be assigned for these pins with controller setting.
For contents of signals, refer to the instruction manual of controller.
2. For sink I/O interface. For source I/O interface, refer to section 3.7.3 of the MR-J3-
B Servo Amplifier Instruction Manual.
3. Speed, position and temperature of the direct drive motor are detected.
4. To configure the absolute position detection system, always connect this by combining with the MR-J3BAT battery. (Refer to
section 9.2.)
5. Fabrication of the encoder cable is required at user side. (Refer to section 9.1.2.)