
















5. PARAMETERS
5 - 5
5.3 Gain/Filter parameters (No.PB
)
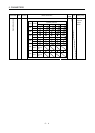
5.3.1 Parameter list
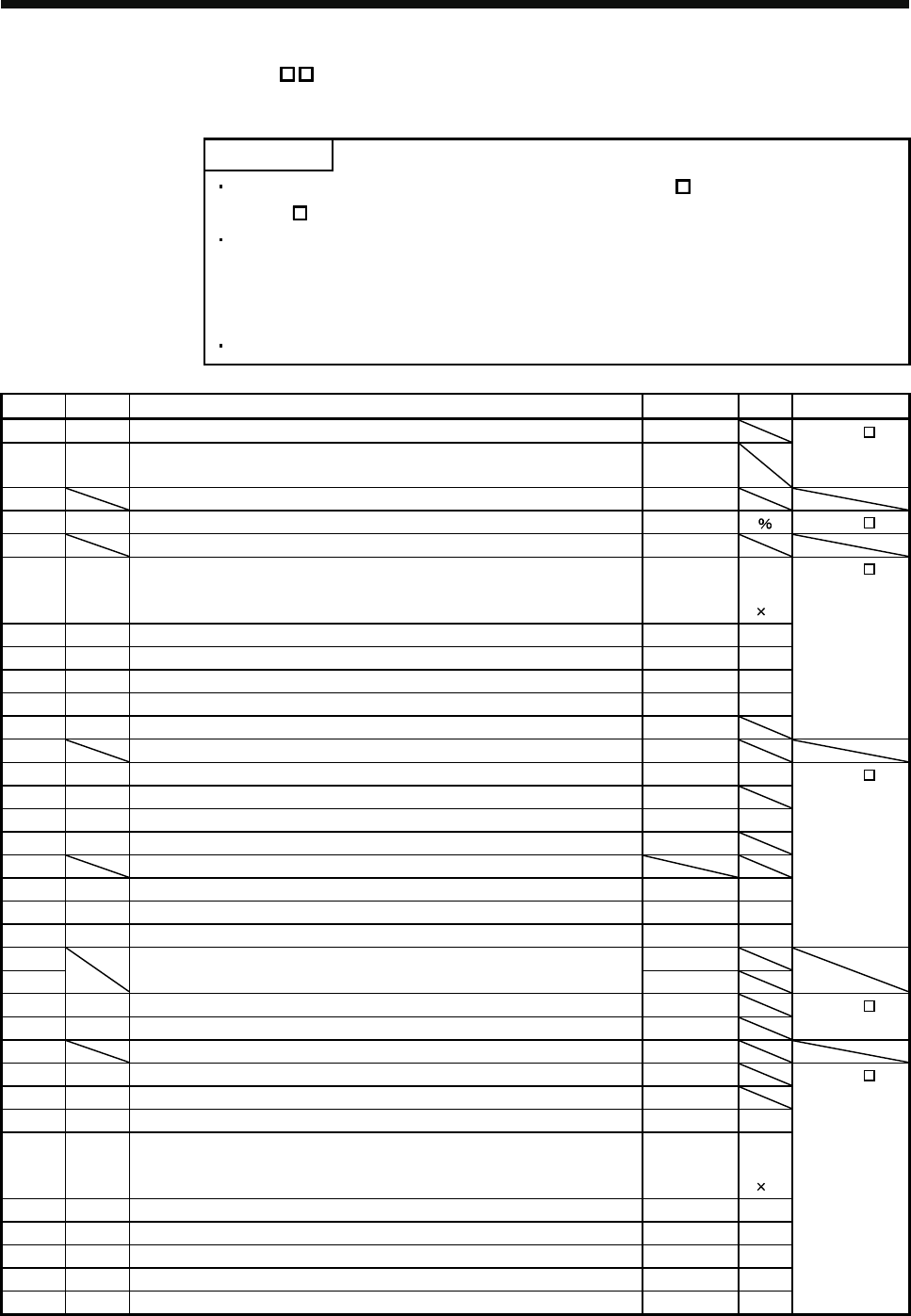
POINT
For details of the parameters in which columns MR-J3- B is written, refer to the
MR-J3-
B Servo Amplifier Instruction Manual section 5.2.
The parameter whose symbol preceded by * can be validated with the following
conditions.
* : Turn off the power and then on again, or reset the controller after setting the
parameter.
Never change the parameters for the manufacturer setting.
No. Symbol Name Initial value Unit Reference
PB01 FILT Adaptive tuning mode(adaptive filter II) 0000h
PB02 VRFT Vibration suppression control tuning mode(advanced vibration suppression
control)
0000h
MR-J3- B
PB03 For manufacturer setting 0
PB04 FFC Feed forward gain 0 MR-J3- B
PB05 For manufacturer setting 500
PB06 GD2 Ratio of load inertia moment to direct drive motor inertia moment 7.0 Multi-
plier
(
1)
MR-J3-
B
PB07 PG1 Model loop gain 24 rad/s
PB08 PG2 Position loop gain 37 rad/s
PB09 VG2 Speed loop gain 823 rad/s
PB10 VIC Speed integral compensation 33.7 ms
PB11 VDC Speed differential compensation 980
PB12 For manufacturer setting 0
PB13 NH1 Machine resonance suppression filter 1 4500 Hz MR-J3- B
PB14 NHQ1 Notch shape selection 1 0000h
PB15 NH2 Machine resonance suppression filter 2 4500 Hz
PB16 NHQ2 Notch shape selection 2 0000h
PB17 Automatic setting parameter
PB18 LPF Low-pass filter setting 3141 rad/s
PB19 VRF1 Vibration suppression control vibration frequency setting 100.0 Hz
PB20 VRF2 Vibration suppression control resonance frequency setting 100.0 Hz
PB21 0.00
PB22
For manufacturer setting
0.00
PB23 VFBF Low-pass filter selection 0000h
PB24 *MVS Slight vibration suppression control selection 0000h
MR-J3-
B
PB25 For manufacturer setting 0000h
PB26 *CDP Gain changing selection 0000h
PB27 CDL Gain changing condition 10
PB28 CDT Gain changing time constant 1 ms
MR-J3-
B
PB29 GD2B Gain changing ratio of load inertia moment to direct drive motor inertia
moment
7.0 Multi-
plier
(
1)
PB30 PG2B Gain changing position loop gain 37 rad/s
PB31 VG2B Gain changing speed loop gain 823 rad/s
PB32 VICB Gain changing speed integral compensation 33.7 ms
PB33 VRF1B Gain changing vibration suppression control vibration frequency setting 100.0 Hz
PB34 VRF2B Gain changing vibration suppression control resonance frequency setting 100.0 Hz