



















J Listing Of Tables
MiLLennium Command Descriptions Manual 239
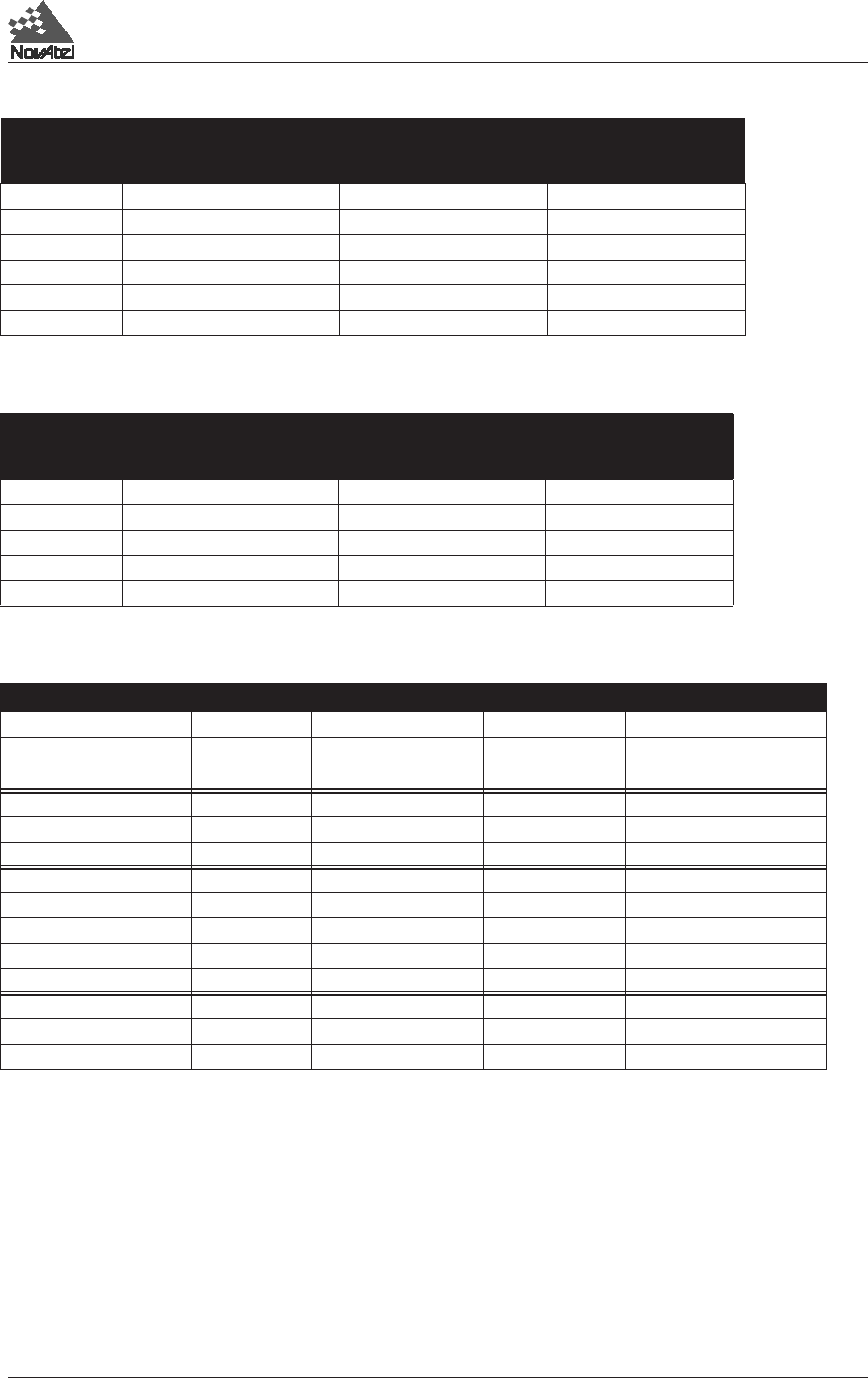
Table E-3 RT-2 Performance: Static Mode
Table E-4 RT-2 Performance: Kinematic Mode
Table E-5 RT-20 Performance
Baseline
length
Time since L2 lock-on
with at least 6 satellites
above mask angle
Horizontal accuracy at
the stated time
Runs meeting the stat-
ed accuracy at the
stated time
< 10 km 70 seconds + 1.5 sec/km 2 cm + 0.5 ppm 75.0%
< 10 km 5 minutes 1 cm + 1 ppm 75.0%
< 15 km 4 minutes 5 cm 66.7%
< 25 km 7 minutes 7 cm 66.7%
< 35 km 10 minutes 35 cm 66.7%
< 35 km 30 minutes 25 cm 66.7%
Baseline
length
Time since L2 lock-on
with at least 6 satellites
above mask angle
Horizontal accuracy at
the stated time
Runs meeting the
stated accuracy at
the stated time
< 10 km 120 seconds + 1.5 sec/km 2 cm + 0.5 ppm 75.0%
< 15 km 8 minutes 8 cm 66.7%
< 25 km 14 minutes 10 cm 66.7%
< 35 km 20 minutes 40 cm 66.7%
< 35 km 60 minutes 25 cm 66.7%
Tracking Time (sec) Mode ① Data Delay (sec) Distance (km) Accuracy (CEP)
1 - 180 Static 0 1 100 to 25 cm
180 - 3000 Static 0 1 25 to 5 cm
> 3000 Static 0 1 5 cm or less
➁
1 - 600 Kinematic 0 1 100 to 25 cm
600 - 3000 Kinematic 0 1 25 to 5 cm
> 3000 Kinematic 0 1 5 cm or less ②
Either 0 - 2 1 +1 cm/sec
Either 2 - 7 1 +2 cm/sec
Either 7 - 30 1 +5 cm/sec
Either 30 - 60 1 +7 cm/sec ③
Either > 60 1 (single point)
Either 0 0 - 10 +0.5 cm/km
Either 0 10 - 20 +0.75 cm/km
Either 0 20 - 50 +1.0 cm/km
① Mode = Static or Kinematic (durin
g
initial ambi
g
uity resolution)
② The accuracy specifications refer to the PRTKA/B lo
g
s which include about 3 cm extrapolation error. RTKA/B
lo
g
s are more accurate but have increased latency associated with them.
③ Between 30 and 60 seconds assumes pseudoran
g
e differential positionin
g
. If Type 1 corrections have not
been transmitted, the accuracy drops to sin
g
le-point mode after 60 seconds.