



















A GPS Overview
MiLLennium Command Descriptions Manual 53
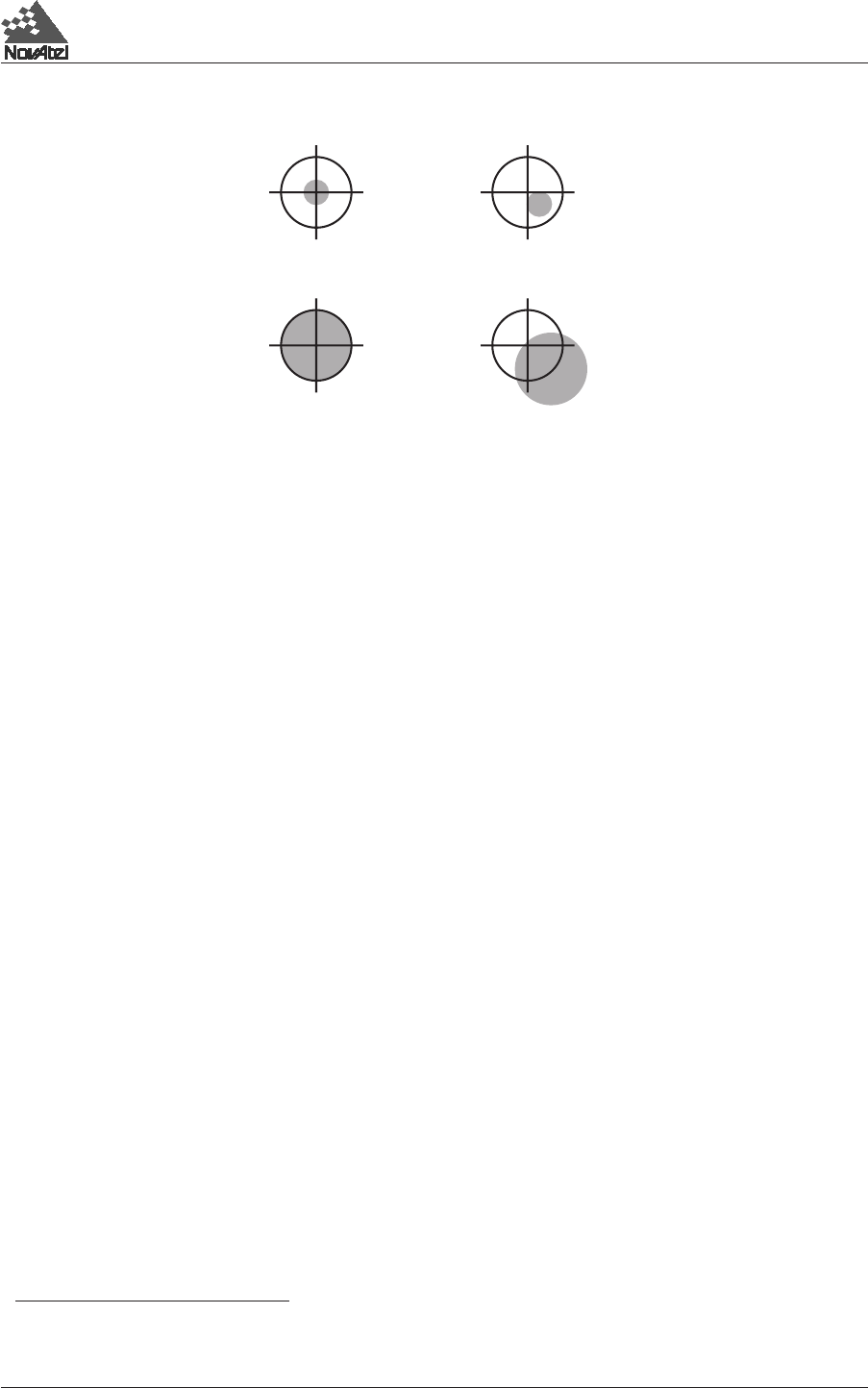
Figure A-3 Accuracy versus Precision
4
Single-point vs. Relative Positioning
In single-point positioning, coordinates of a GPS receiver at an unknown location are sought with respect to the
earth's reference frame by using the known positions of GPS satellites being tracked. The position solution
generated by the receiver is initially developed in earth-centred coordinates which can subsequently be converted
to any other coordinate system. With as few as four GPS satellites in view, the absolute position of the receiver in
three-dimensional space can be determined. Only one receiver is needed. With Selective Availability (SA) active,
the typical horizontal accuracy obtainable using single-point positioning is of the order of 100 m (95% of the time).
In relative positioning, also known as differential positioning, the coordinates of a GPS receiver at an unknown
point (the “remote” station) are sought with respect to a GPS receiver at a known point (the “reference” station).
The concept is illustrated in Figure A-4. The relative-position accuracy of two receivers locked on the same
satellites and not far removed from each other - up to tens of kilometres - is extremely high. The largest error
contributors in single-point positioning are those associated with SA and atmospheric-induced effects. These
errors, however, are highly correlated for adjacent receivers and hence cancel out in relative measurements. Since
the position of the reference station can be determined to a high degree of accuracy using conventional surveying
techniques, any differences between its known position and the position computed using GPS techniques can be
attributed to various components of error as well as the receiver’s clock bias. Once the estimated clock bias is
removed, the remaining error on each pseudorange can be determined. The reference station sends information
about each satellite to the remote station, which in turn can determine its position much more exactly than would
be possible otherwise.
The advantage of relative positioning is that much greater precision (presently as low as 2 mm, depending on the
method and environment) can be achieved than by single-point positioning. In order for the observations of the
reference station to be integrated with those of the remote station, relative positioning requires either a data link
between the two stations (if the positioning is to be achieved in real-time) or else post-processing of the data
collected by the remote station. At least four GPS satellites in view are still required. The absolute accuracy of
the remote station’s computed position will depend on the accuracy of the reference station’s position.
4. Environment Canada, 1993, Guidelines for the Application of GPS Positioning, p. 22.
Minister of Supply and Services Canada
High accuracy,
high precision
High accuracy,
low precision
Low accuracy,
low precision
Low accuracy,
high precision