



















7. INITIAL SETTINGS
7-37
Guidelines for how to set [Sea State]
[Weather]: When the sea is rough, the boat's heading fluctuates to port and starboard.
If the rudder is driven very often to maintain the set course, the helm mechanism may
wear out. To prevent this, the weather adjustment makes the NAVpilot insensitive to
minute course deviations. You may choose a degree between 1° to 10°. Until the
course deviation exceeds the selected setting, steering to correct the heading will not
be initiated.
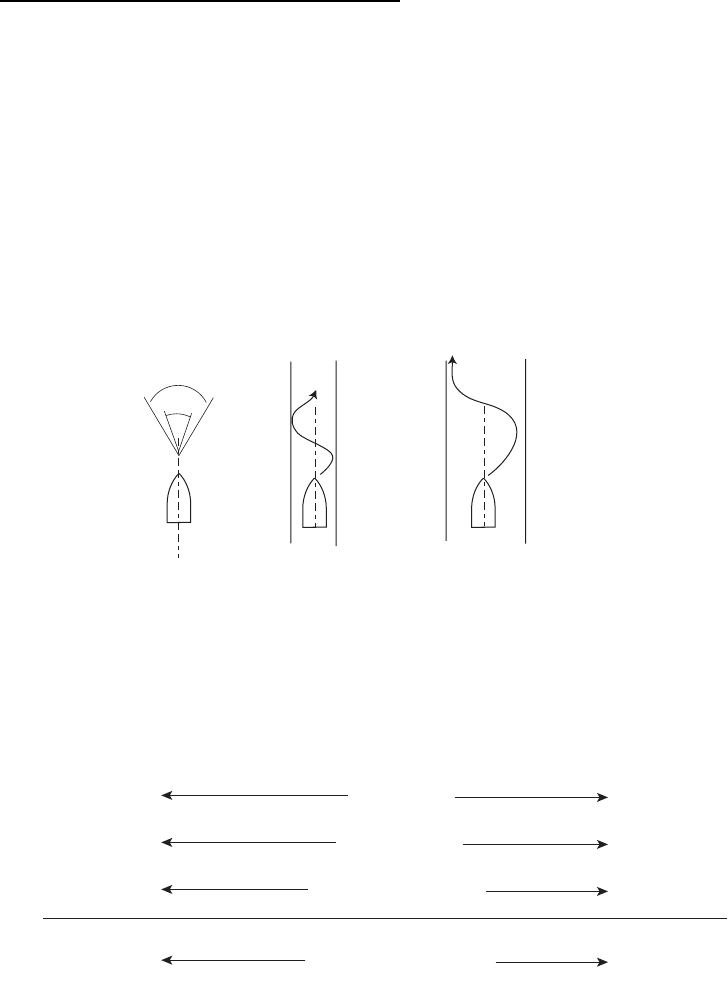
The illustration at the top of the next page shows boat's track lines with weather setting
3° and 7°. When 7° is set, for example, the rudder is not driven until the course devi-
ation exceeds 7°. Increasing the setting reduces activation of the steering gear, how-
ever the boat tends to zigzag. When the sea is calm, set a smaller value.
[Rudder Gain]: When the boat's heading deviates from the set course, the NAVpilot
adjusts the rudder to correct it. The rudder angle (number of degrees) which is steered
against every degree of course deviation is known as the rudder gain.
Set the rudder gain so that the boat does not make frequent yaw. The figure shown
below provides general guidelines for setting the rudder gain.
7°
3°
[Weather] = 3° [Weather] = 7°
Speed
Sea State
Load Condition
[Rudder Gain]
Fast
Calm
Light
Low
Slow
Rough
Heavy
High