



















BBV28581 05/2010 125
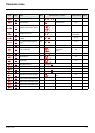
Parameter index
Code Page Name Unit Possible value / Function Factory setting
User
setting
HSP4
90
High speed 4 Hz as HSp2 as HS2
as HSp2
HSU
41
Display of high speed value - - - - -
InH
95
Detected fault inhibition
assignment
nO
L1H
L2H
L3H
L4H
Non active
L1h: LI1 active high
L2h: LI2 active high
L3h: LI3 active high
L4h: LI4 active high
nO
IPL
94
Input Phase loss -
nO
YES
No
Yes
YES
Ith 94
Motor thermal current A 0.2 to 1.5 -
according to
drive rating
JOG
68
Jog assignment
nO
L1H
L2H
L3H
L4H
No
L1h: LI1 active high
L2h: LI2 active high
L3h: LI2 active high
L4h: LI4 active high
nO
JPF
70
Skip frequency Hz 0 to 400 -0 Hz
LC2
88
2nd current limitation
commutation
nO
L1H
L2H
L3H
L4H
L1L
L2L
L3L
L4L
No
L1h: LI1 active high
L2h: LI2 active high
L3h: LI3 active high
L4h: LI4 active high
L1L: LI1 active low
L2L: LI2 active low
L3L: LI3 active low
L4L: LI4 active low
nO
LCr
39
Motor current A - - - -
LFd 79
Zero flow detection offset Hz 0 Hz
LFF
76
Fallback speed Hz 0 Hz
LFL1
95
4-20 mA loss behavior
nO
YES
No
Yes
nO
LFr
39
45
62
External reference value - -400 to 400 -0
LIS1 41
State of logic inputs LI1 to LI4 - - - - -
LOC
54
77
Application Overload threshold
% of
NCR
70 to 150 - 90 %
LO1 53 LO1 assignment as r1 as r1 nO
LO1S 53
LO1 status (output active level)
POS
nEG
Positive
Negative
POS
LOS1 41
State of the logic output LO1
and relay R1
-- - - -
LPI 76
PI feedback supervision
threshold
nO
LSP
45
89
Low speed Hz 0 to HSP -0 Hz