



















“A” Group: Standard Functions
Configuring
Drive Parameters
3–20
DC Braking Settings
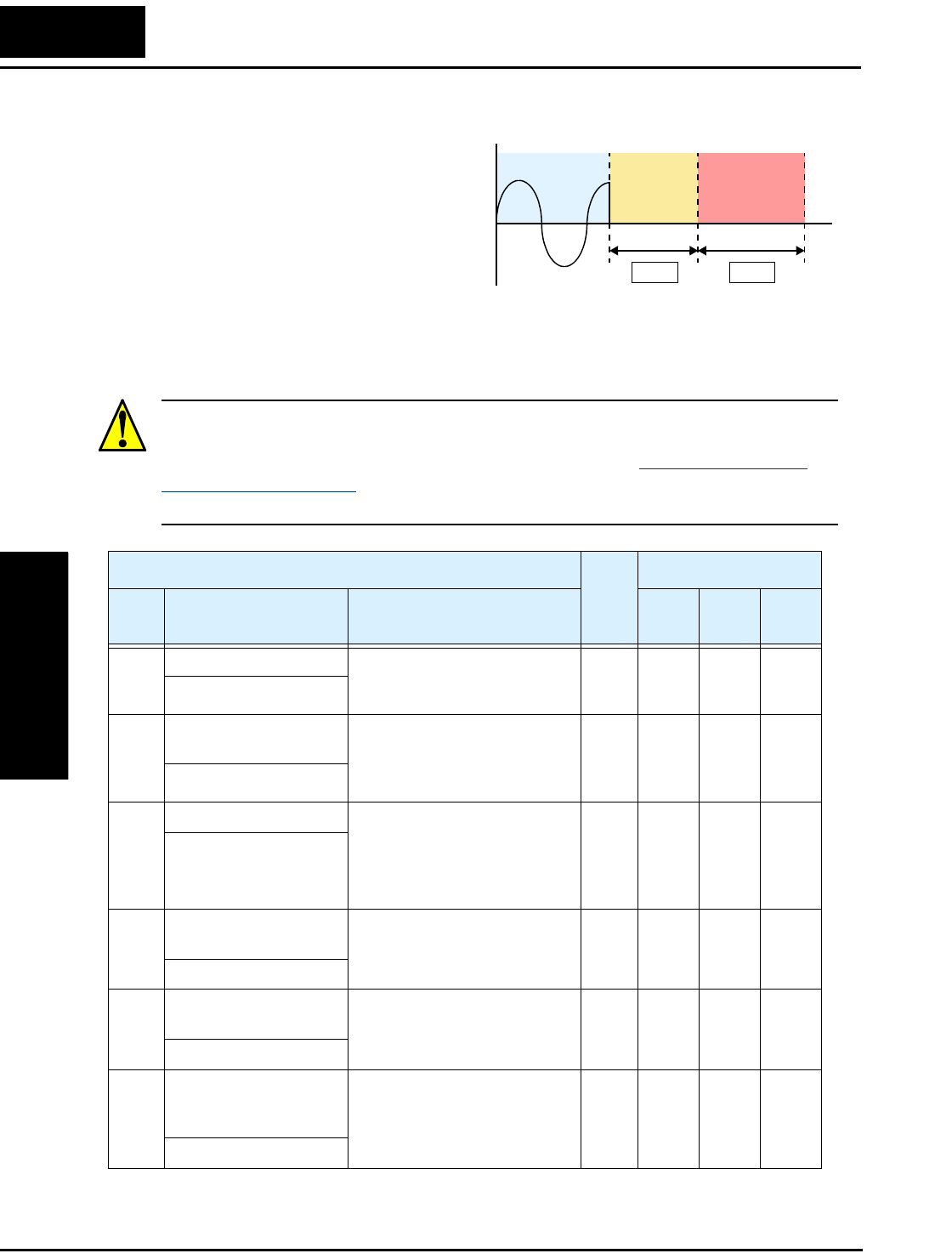
The DC braking feature can provide
additional stopping torque when
compared to a normal deceleration to a
stop. DC braking is particularly useful
at low speeds when normal decelera-
tion torque is minimal. When you
enable DC braking, the inverter injects
a DC voltage into the motor windings
during deceleration below a frequency you can specify (A052). The braking power
(A054) and duration (A055) can both be set. You can optionally specify a wait time
before DC braking (A053), during which the motor will free run (coast).
CAUTION: Be careful to avoid specifying a braking time that is long enough to cause
motor overheating. If you use DC braking, we recommend using a motor with a built-in
thermistor, and wiring it to the inverter’s thermistor input (see “
Thermistor Thermal
Protection” on page 4–25). Also refer to the motor manufacturer’s specifications for
duty-cycle recommendations during DC braking.
DC brakingFree runRunning
t
0
+
–
A053 A055
“A” Function
Run
Mode
Edit
Defaults
Func.
Code
Name /
SRW Display
Description
–FEF
(EU)
–FU
(USA)
Units
A051 DC braking enable Two options; select codes:
00...Disable
01...Enable
✘ 00 00 —
DCB Mode OFF
A052 DC braking frequency
setting
The frequency at which DC
braking begins,
range is from the start
frequency (B082) to 60 Hz
✘ 0.5 0.5 Hz
DCB F 0000.5Hz
A053 DC braking wait time The delay from the end of
controlled deceleration to start
of DC braking (motor free runs
until DC braking begins),
range is 0.0 to 5.0 sec.
✘ 0.0 0.0 sec.
DCB Wait 0000.0s
A054 DC braking force for
deceleration
Level of DC braking force,
settable from 0 to 100%
✘ 0. 0. %
DCB V 00000%
A055 DC braking time for
deceleration
Sets the duration for DC
braking, range is 0.0 to 60.0
seconds
✘ 0.0 0.0 sec.
DCB T 0000.0s
A056 DC braking / edge or
level detection for [DB]
input
Two options; select codes:
00...Edge detection
01...Level detection
✘ 01 01 —
DCB KIND LEVEL